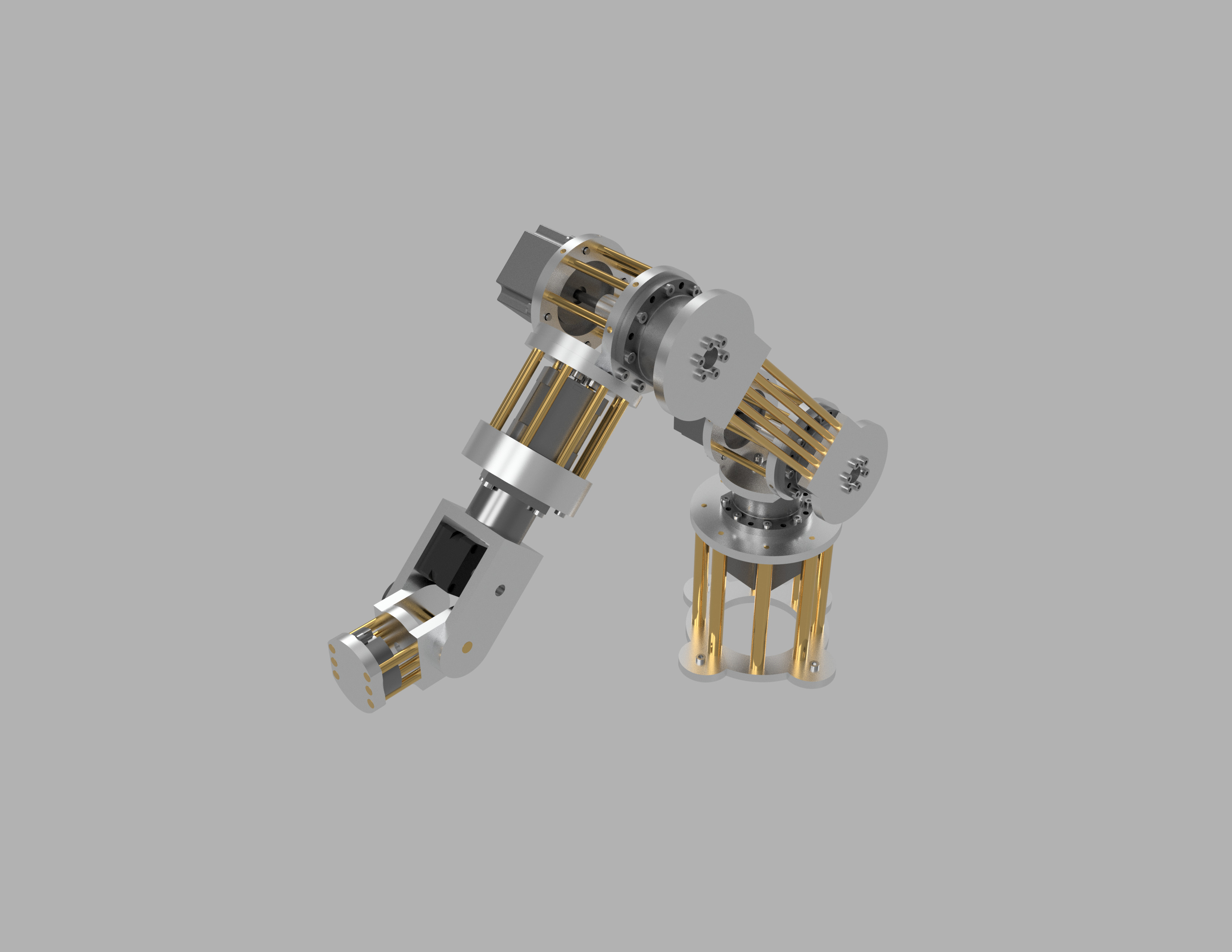
After receiving my Nomad two weeks back and having spent some time getting use to meshcam and carbide, it’s time to start on one of two robot arms I’ve been working on. I’ll post updates on the build out over the next couple of weeks, but in the broad strokes, the drive chain consists of a combination of nema 23 and nema 17 motors and some harmonic drives I picked up second hand on ebay. The structure will be a combination of hardwood, brass and aluminium (for the more complex 6-DOF arm).
Im very interested in this project, I built one of the kickstarter arm kits (laser cut acrylic) and metal is definitely the way to go.
Please keep us updated on your progress!
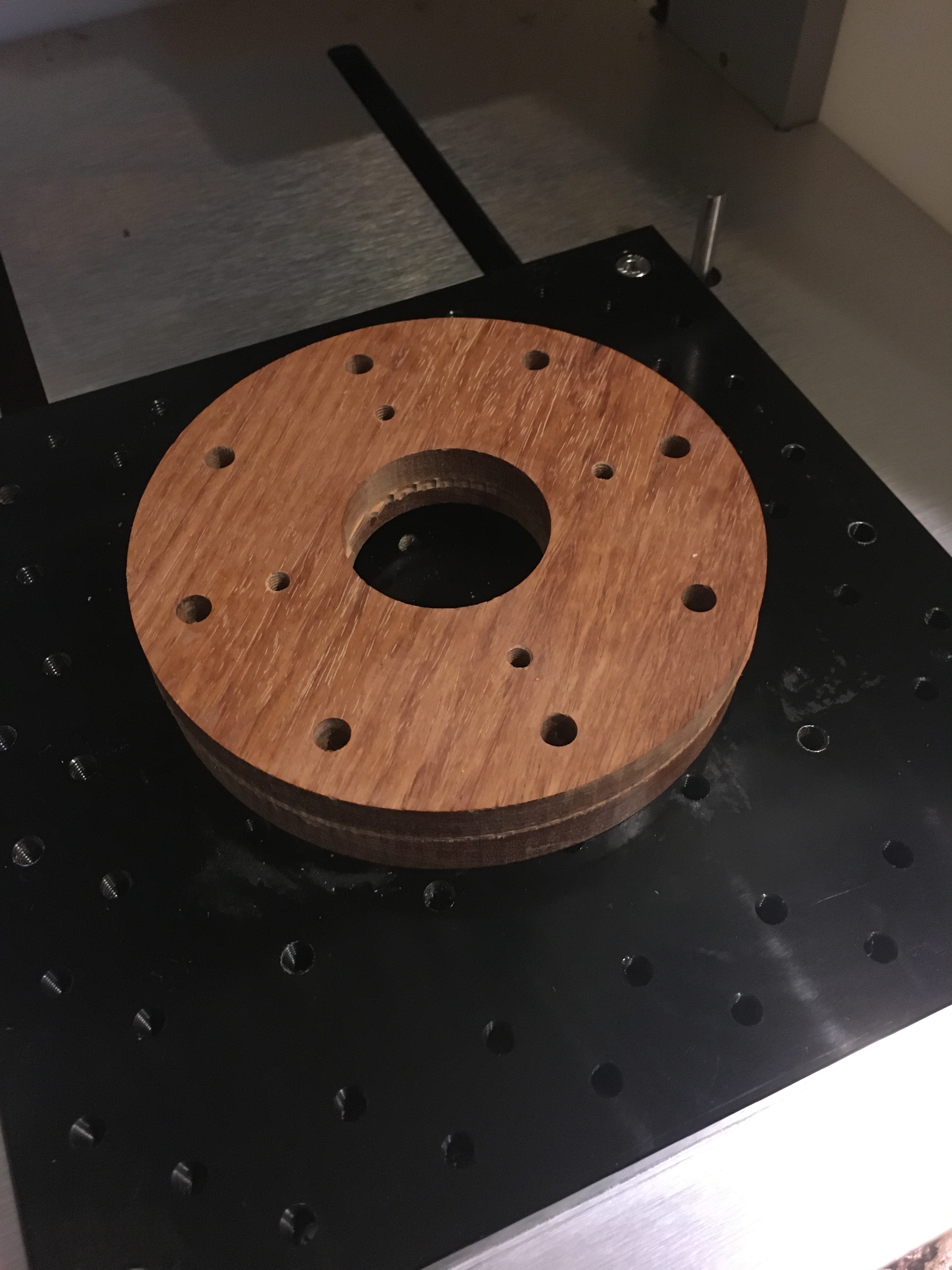
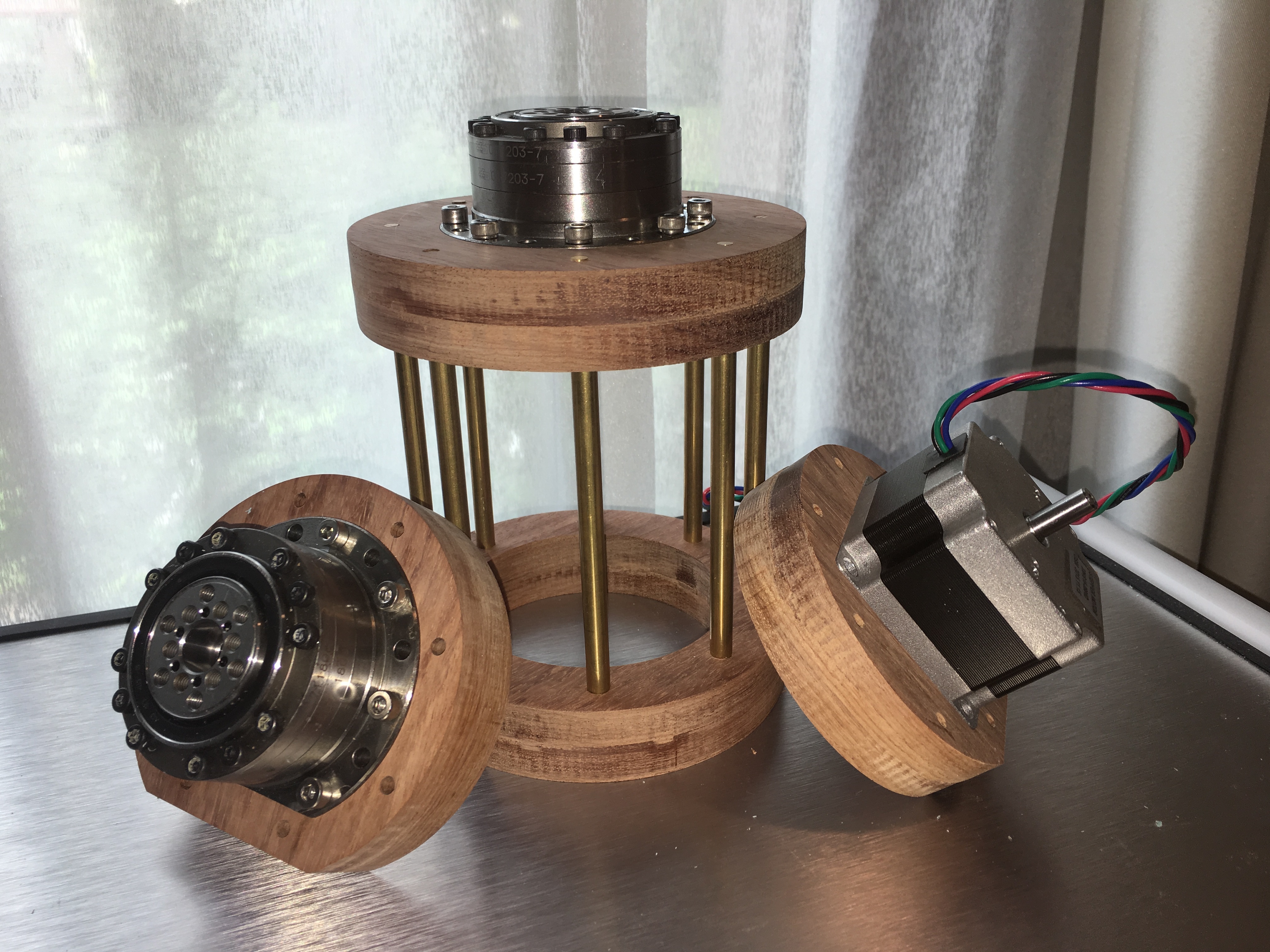
Thanks for your interest @ApolloCrowe. A five week old baby and living in an apartment have meant that I have needed to be “opportunistic” on the Nomad. I’ve also been learning how to use Meshcam and given I’m working with hardwoods that aren’t in ready supply where I’m living, I’ve needed to take my time. Anyway, excuses to one side, the first and most complex milling job is complete.
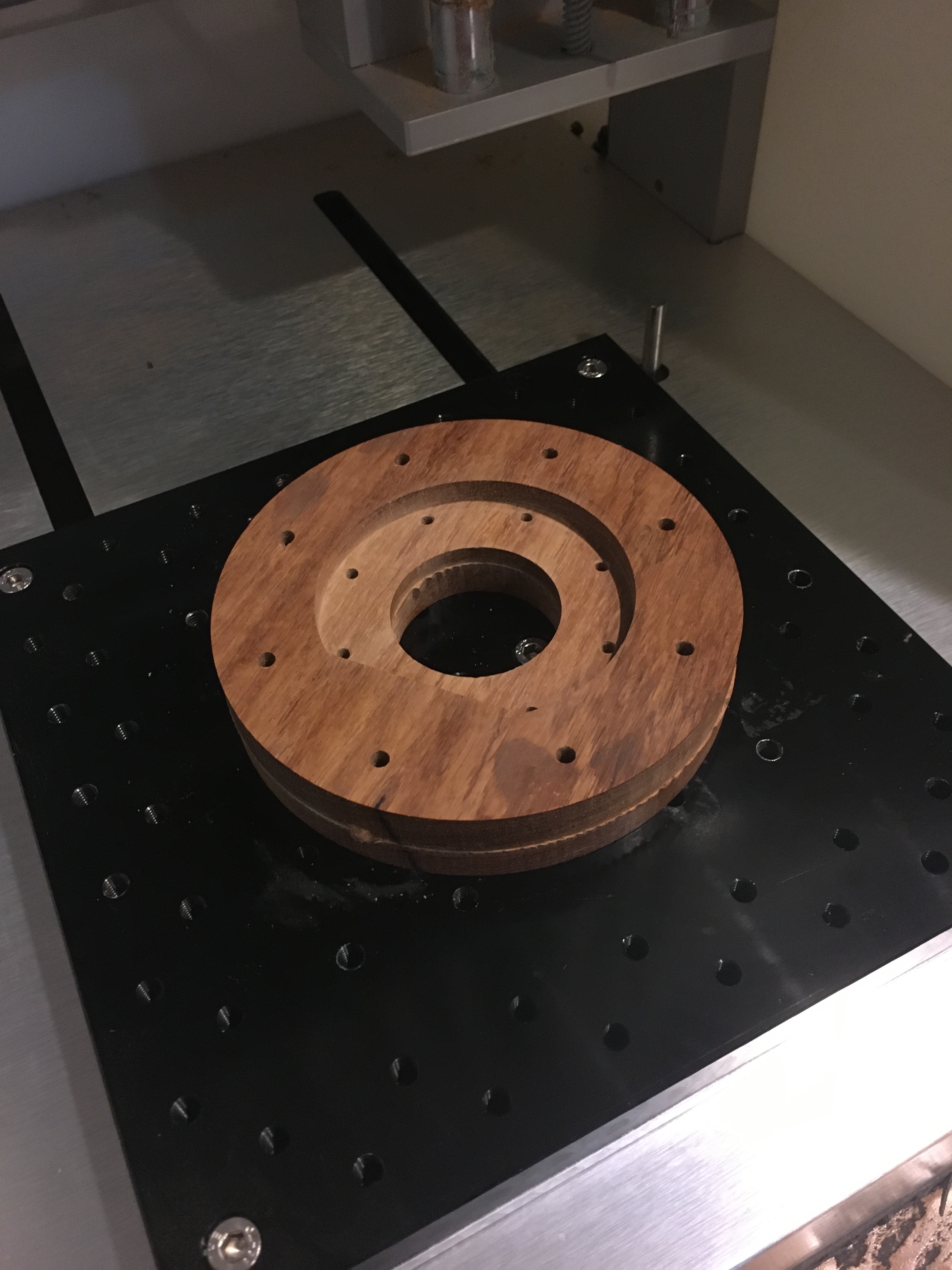
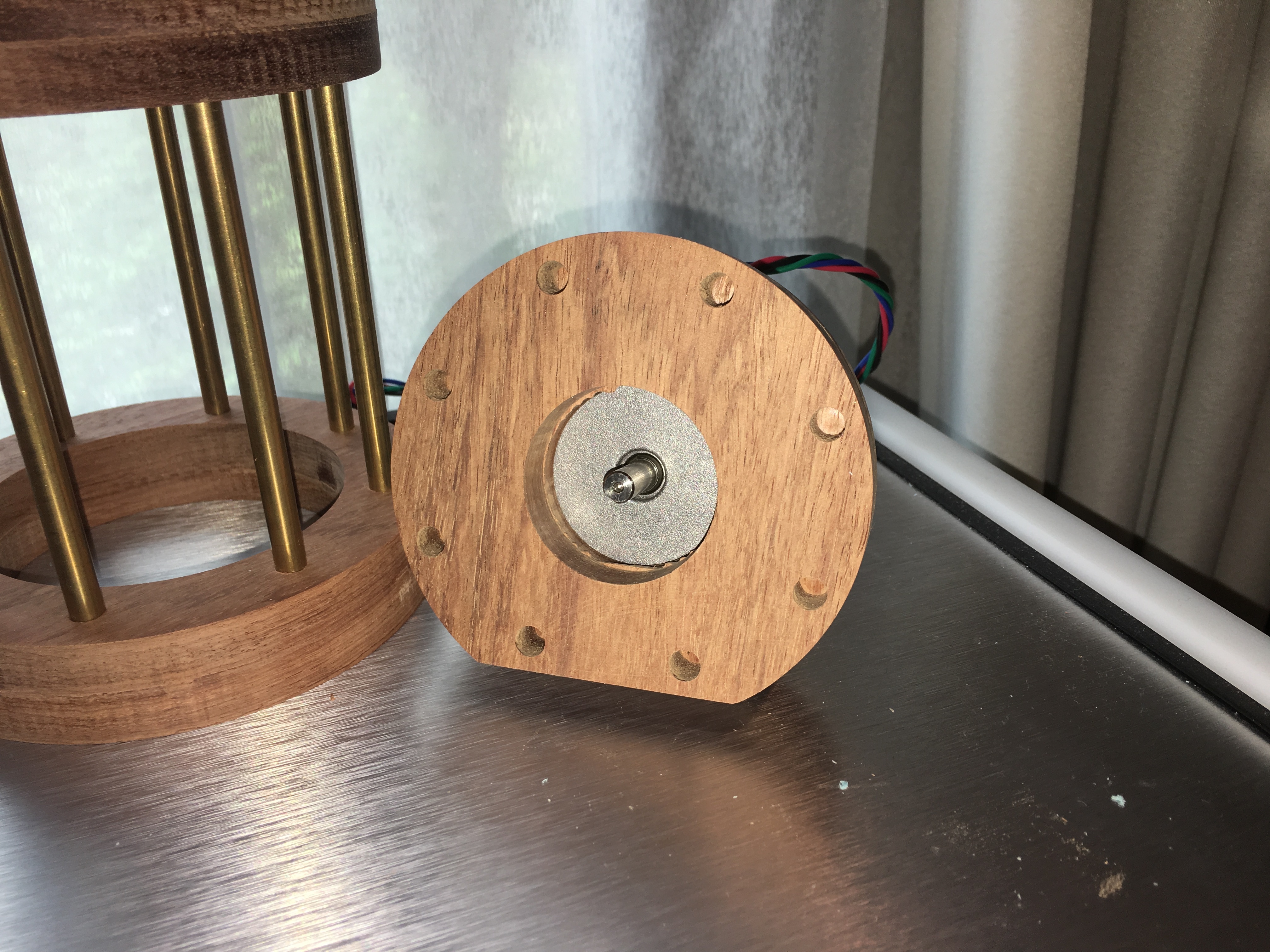
I will need to clean up the piece as I had to halt the job due to the centre island not having any tabs in place (I tried to add them in Meshcam but it appears that they are restricted to the outermost perimeter of a piece). Overall I’m very happy with the result. The Nomad did a sterling job of this double sided piece.
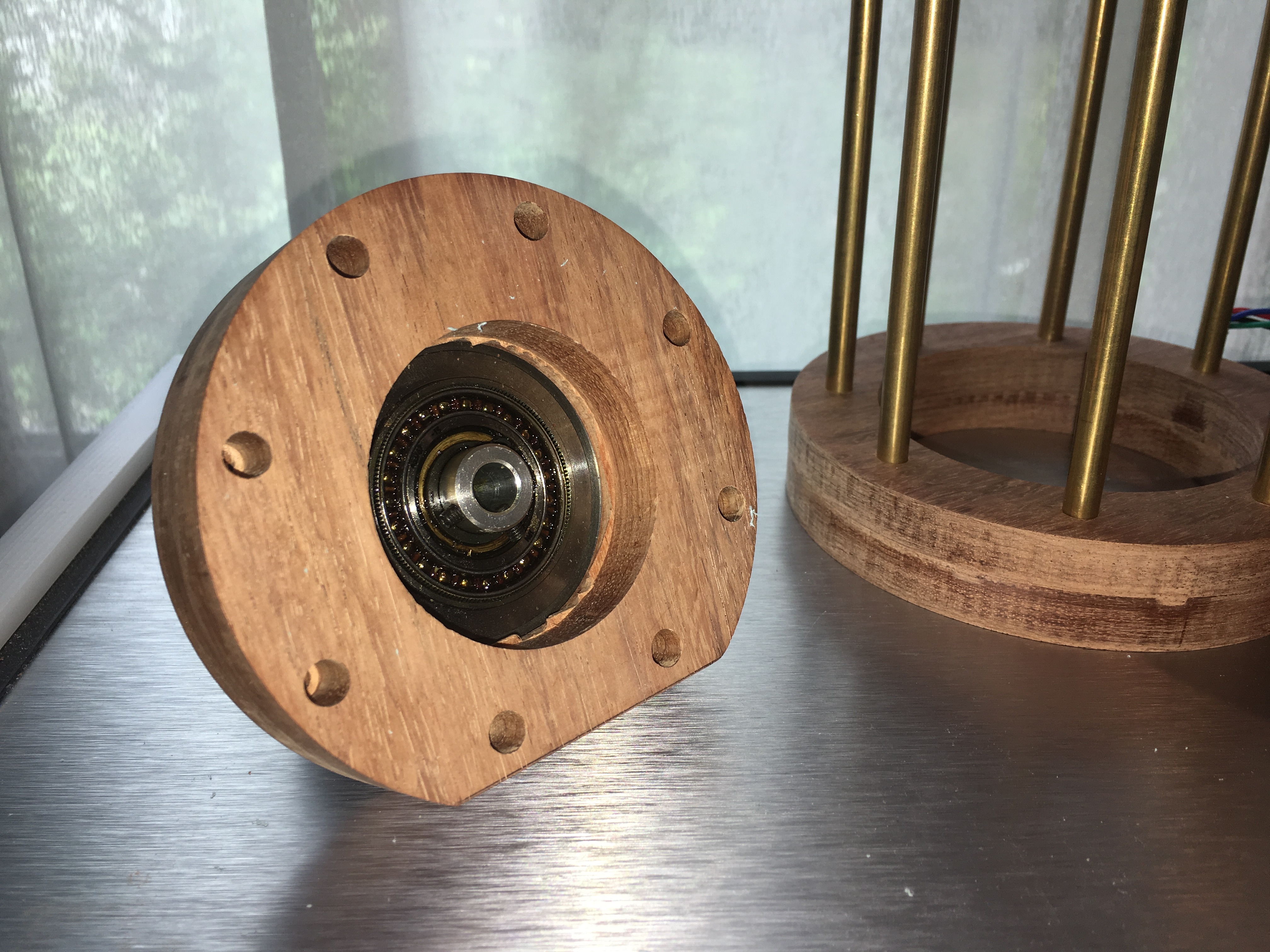
I’m also very pleased with the accuracy of the resulting piece. While the harmonic drive isn’t pushed all the way home for the photo (it’s a snug fit and a little tricky to remove), it’s exactly as I wanted it to be.
I’ll post updates between work, babies and keeping the neighbours happy.
For those of you who are interested, here’s a copy of the stl file too. base plate top v34.stl (375.7 KB)
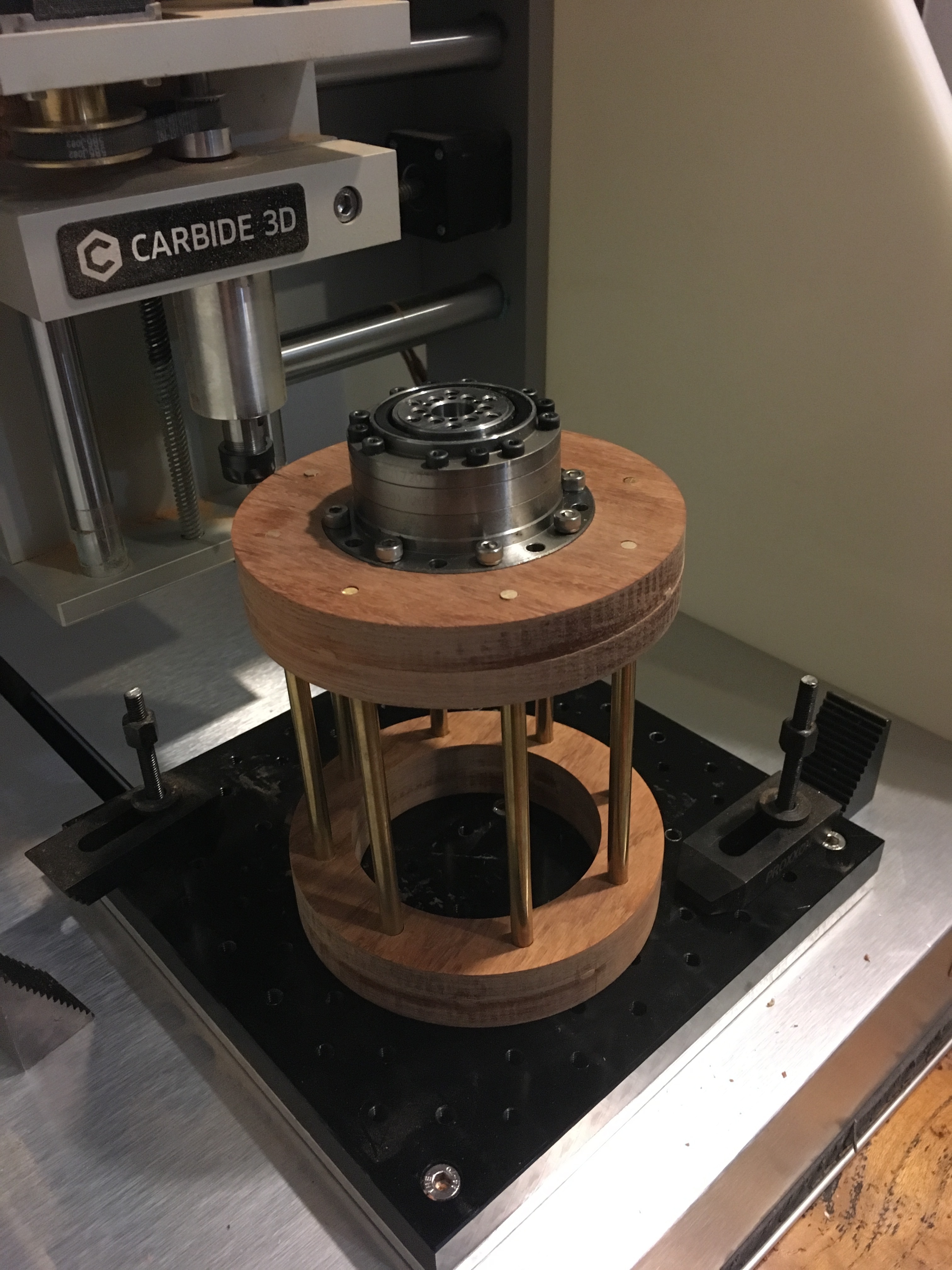
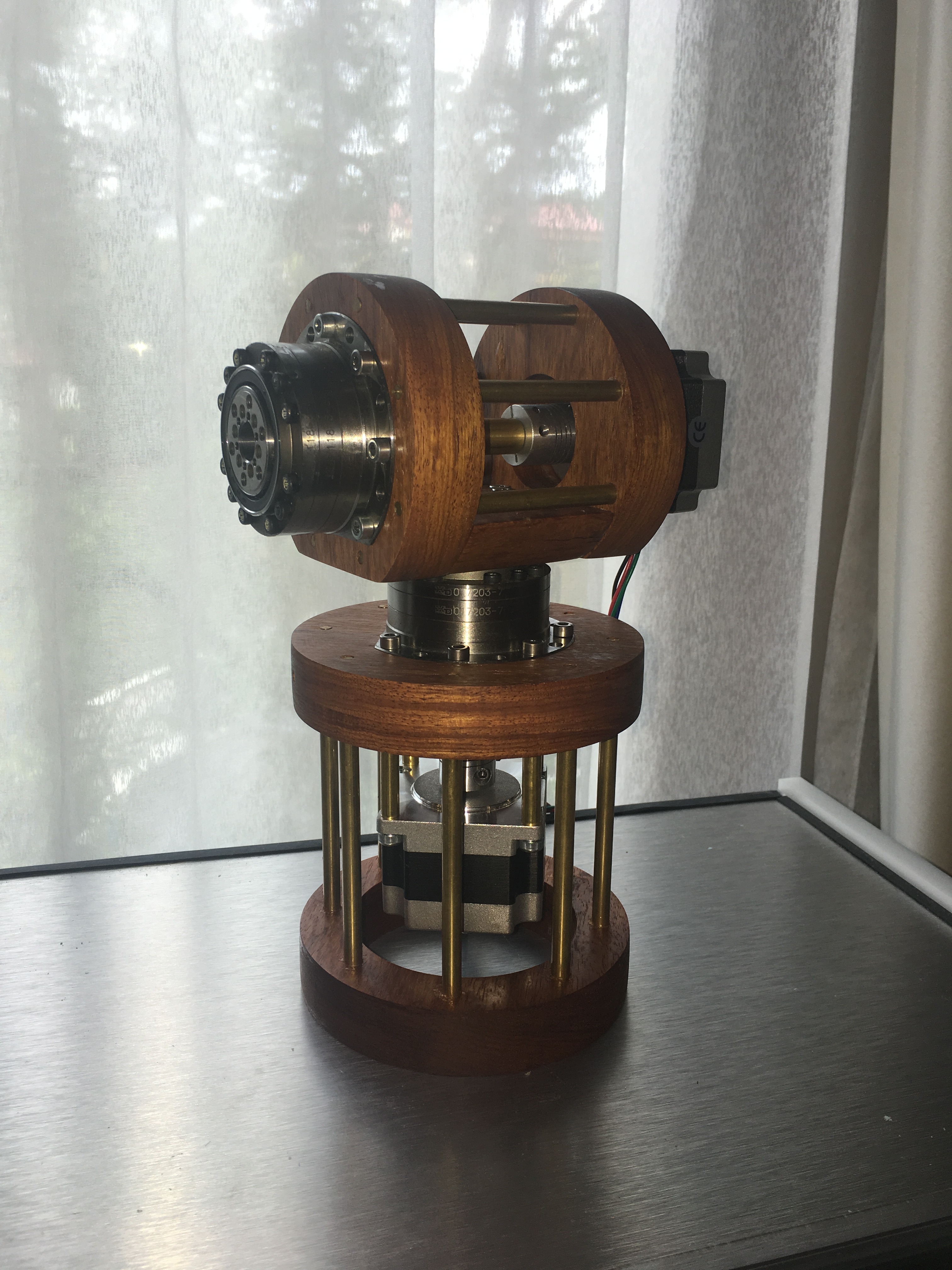
An earlier prototype for the joint #1 to joint #2 mounting plate didn’t quite look right so back to the drawing board for that component. Once the component is revised and milled, I’ll need to drill two deep holes to support the bottom two support rods, then machine eight brass support rods on the lathe.
Here’s a photograph of where I am up to. After trying a few options for the plate that connects the base (joint #1) to joint #2, I finally settled on a design I felt happy with. With the milling complete, it was over to the lathe to create the rods (with shoulders) that connect the stepper motor and harmonic drive mounting plates.
The next step is to create the drive shaft for joints #1 and #2 on the lathe as well as four short pillars/spacers to mount the stepper motor on joint #1. I’ll then finish the wooden surfaces, stain and glue the components together. After that, it’ll be time to connect some stepper drivers and bring the model to life.