Carbide 3D Community Site
Shapeoko 3 XXL rigidity question
CNC Machines
Shapeoko
gmack
(Gerald Mackelburg)
September 3, 2018, 2:41pm
13
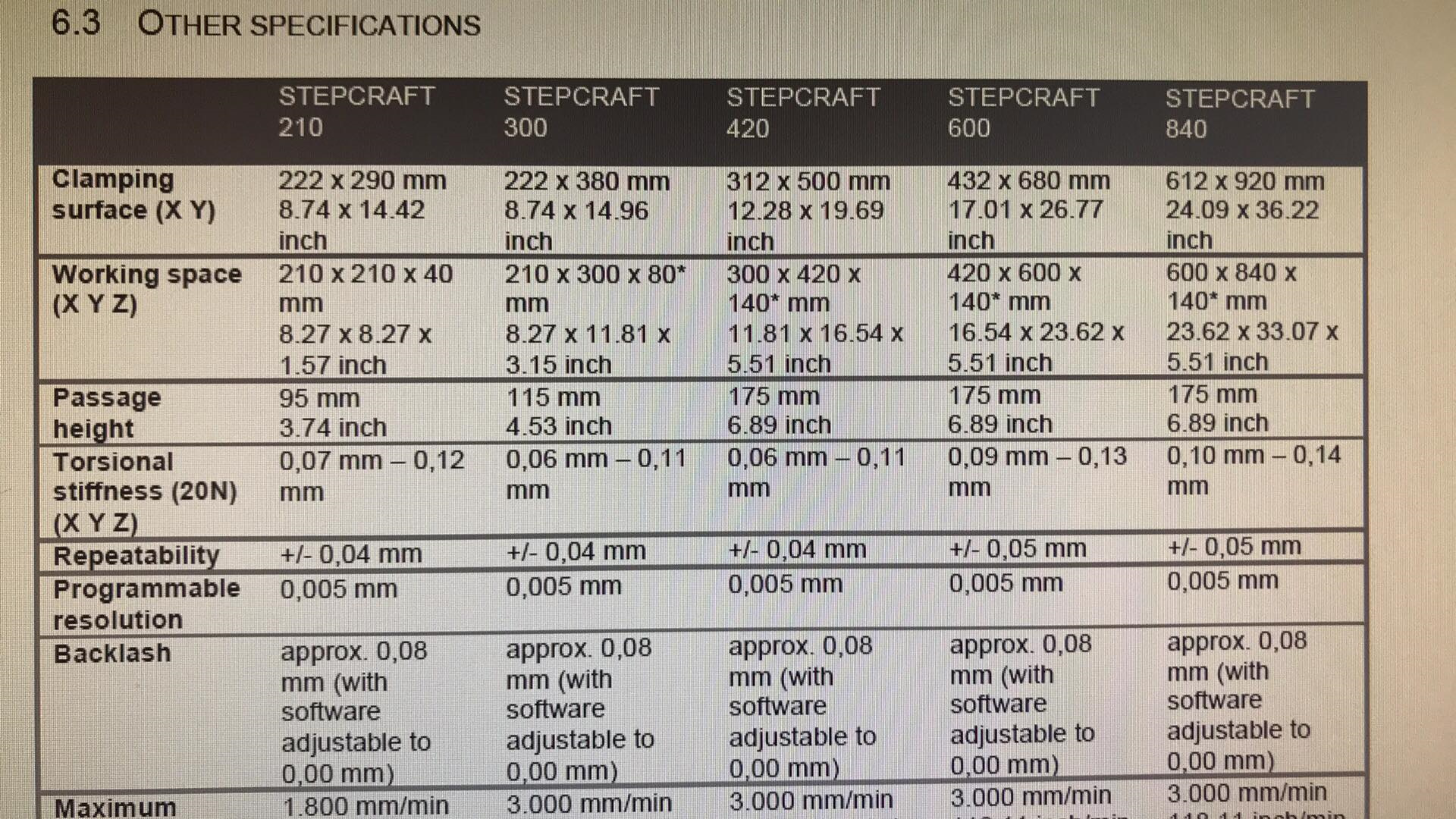
Yesterday Stepcraft responded that their torsional stiffness spec. has not changed.
image.jpg
1920×1080 620 KB
SuperPID-help cutting aluminum?
Origin/consistency of chipload recommendations
Nomad with deep DOC, shallow WOC
SuperPID-help cutting aluminum?
X-axis slippage
show post in topic