In perusing the forum at Carbide3D, I learned of another software package that added more utility to the Shapeoko package. It is called EstlCAM and the two parts of it that really grabbed my attention are, the Surface Scanning and Trochoidial milling. Engineers, you might want to head down to the next paragraph…warning, layman not just stepping in it, but playing Barney Fife…in a red shirt, on Star Trek…)Surface scanning allows the machine to scan a three dimensional surface and use the scan data from that scan to convert planar milling to actually fit the surface. Trochoidial Milling allows a machine to cut harder material than it can using conventional milling, by removing more material with a smaller cutting surface area-much like overlapping mower cuts when the grass is too tall from all of the rain…Go straight in to 100% tall grass and the mower boggs and stalls, overlap the previous cut and the mower keeps going! It takes more time and more fuel but gets the job done by lowering the amount of cutter contact(friction) To quote a web service I have seen, “Dude, I want That!”
One challenge to using EstlCAM with The Carbide 3D Shapeoko is that the accompanying software uses GRBL firmware and EstlCAm uses its own. The good news is that the Carbide Motion Controller has an Erasable Programmable Read Only Memory (EPROM) chip that can be relatively easily reprogrammed through connection the a computer and following simple instructions to erase and reprogram(also called Flashing) it for use with either Carbide Motion or EstlCam. If the use of one to the other is occasional, Flashing is the most economical way to make the change-because the time to change is a few minutes, by simply flashing the controller board. If the swapping between is constant, a quicker way to go is to setup a second controller board set up for the other one, swapping one board for another. One issue that would ultimately arise is wear on the connection points, the type of connectors used in the Shapeoko are designed more for occasional cycling(unplug/replug) than any sort of consistent cycling, add to that 10 connectors that have to be moved (3 for switches, 4 for stepper motors, one usb cable and a power cable) with each controller board swap.
A better answer is to use switches, allowing the contacts of the switch to deal with the wear of cycling on the connectors-something switches are designed to do!
One of the more skilled, patient and experienced Shapeoko owners, Jim Amos (jimidi) made up what I believe is the ultimate way of doing this here: What's better than ONE CM controller? Two of course He has it set up to simply insert a three prong key that pushes three switches! I admired and even lusted after his setup, but knew what had taken him a good bit of time to plan, collect supplies, execute and polish, would be more of a time challenge to me than the more immediate answer I needed.
So, I considered how I would set up an efficient act of board swapping, and what would I need? I looked around my raw materials area(my Pile of stuff too good/cool/expensive to just throw away) for inspiration, and found something interesting!
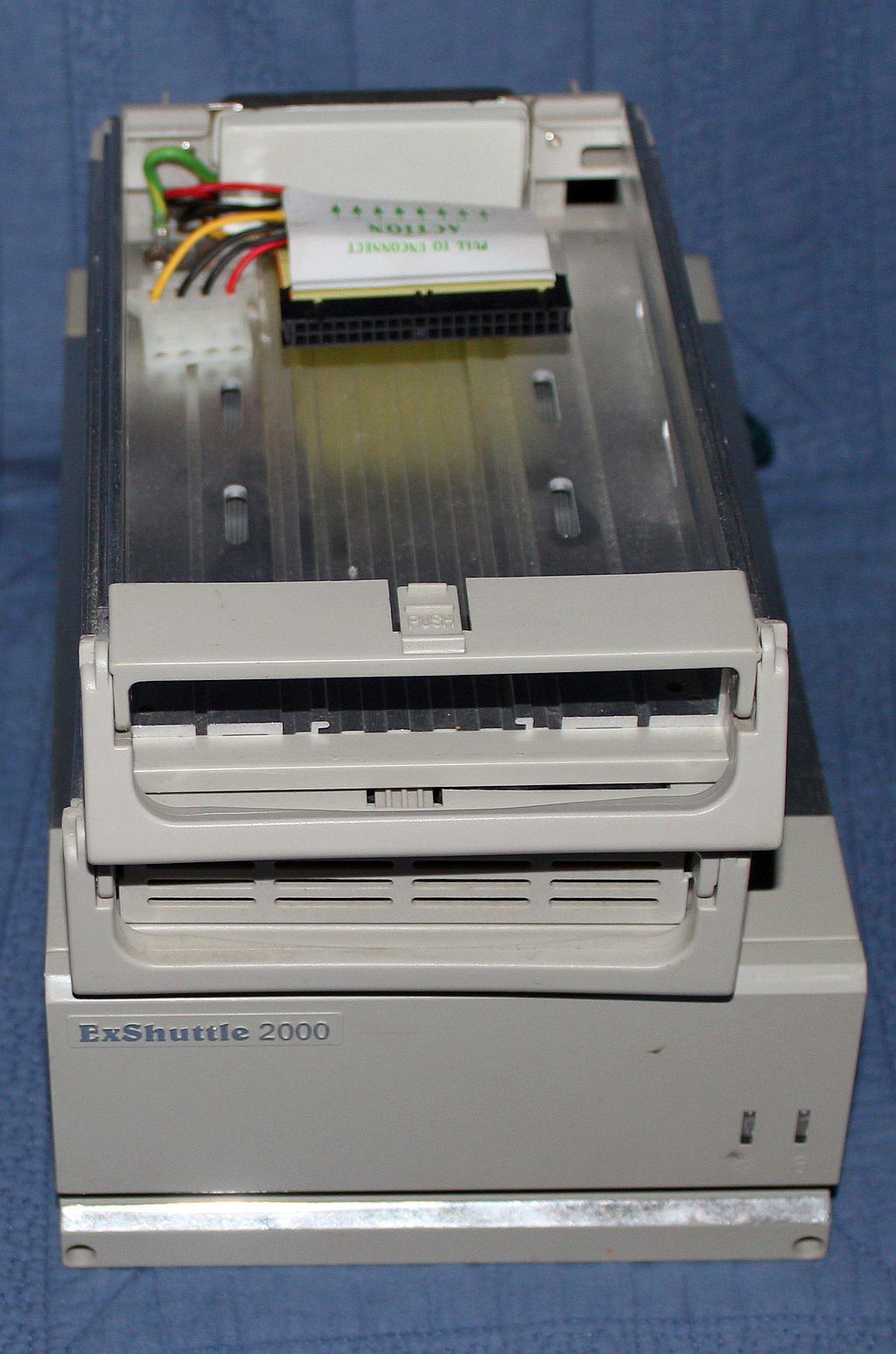

An EXShuttle external removable hard drive system with several trays, eyeballing it, the tray looked just big enough to accommodate the Carbide Motion Controller Board! So I took it over to the Shapeoko took took off the board cover, opened up the shuttle drive tray, and looked at what I had to fit in what space-they looked companionable…OK, Next I counted connections… The Shapeoko Motion Controller had 47 pins either labeled or not(not including those labeled expressly for the Nomad), and provision for more, and then there were 10 more connections for the power connector and USB connection. Bringing the total number of possible connections to 69-ahem. As it sits on my table the Shapeoko uses 22 pins for the motors and sensors, and two 5 connection plugs for power and USB-meaning I need 32 connections to make it work as it is…but…I want to leave room for add ons! When Carbide 3D offers Carbide Connect/Touch Probe/Laser head, yet to be announced accessories that I simply wont be able to refuse, I want to be ready! So I want an abundance of connections, I want to design the board swapping paraphernalia to be as upgrade-able as my Shapeoko XXL!

SO I looked closer at the particulars of the External Swappable drive bay. What did it have that I needed?
- Was the drive bay actually big enough?
So I broke out the Vernier Calipers and took a few Measurements
Carbide Motion Board: 70.4mm(side to side) x 163mm(End to end including over hang of power connection) x 29.6mm (top of tallest component to lowest solder protrusion on the bottom of the board)-might also have to consider the length of the power and usb connectors that plug into the board
Stand off between board and mounting plate 3mm
Heat sink contact patch. 76Mm x 11mm x3mm
Carbide Motion Board bolt Pattern rectangular 63mm x 152mm

Tray inside measurements: 102mm x 166*mm x 30mm
*an additional 14mm could be added to the 166 my end cap modification.
Would it be able to provide the needed heat sinking? both tray, and bay made from Aluminum extrusions with a fans for cooling! I will have to fab up and attach a heatsink contact between the board ad the aluminum tray-it also does not have the immediate thermal mass the Shapeoko heatsink does…
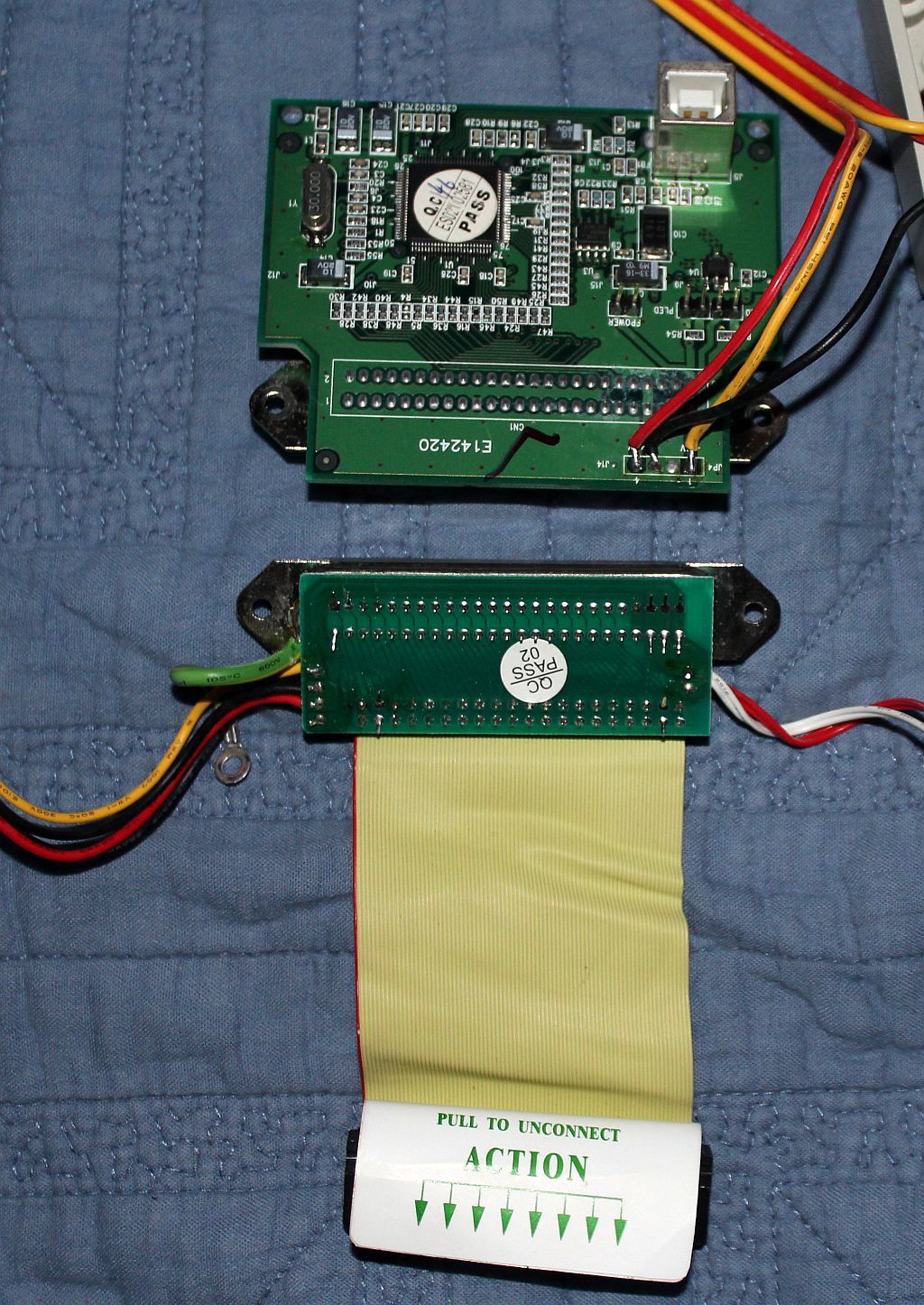
Electrical connections…DB50 connector already operational and high contact cycle rated…good for what I need now(42 connections) but possibly several pins short of what I could need to address future upgrades. Also I need to check the current rating of the contacts(in case I need to double some up). Looking good, but…still looking for a better answer.
Plastic end pieces are easily modifiable for necessary changes-and provide a positive lock in place pull handle!
Seems like I have a tool somewhere that could make good lookin’ holes in the plastic and aluminum as needed…
Looks like recycling this External Drive bay/tray combination t in several hours of work it would be a lasting solution and a great addition to my Shapeoko XXL!
To make this work I need to:
- De-solder the existing circuit boards from the DB50 connectors
- Connect the Motors and switches from the Shapeoko to the DB50 connector Drive Bay
- Connect the pins and connectors from each of the Carbide Motion Control boards to the DB50Connector in each of the two Removable Drive Trays.
- Flash the Second Carbide Motion Controller board Install the boards one at a time and test.
I want the wiring to be clean, orderly and easily follow-able. So I am considering alternatives to an extended writhing mass of 50 noodles in each small confined area…
Ideas:
- make a Printed Circuit Board to replace those already on the connectors to handle routing for each piece-meaning I need three Printed Circuit Boards, because they are each for the same circuits, they can be copies of each other, and add right angle usb plug-to minimize use of space, and a pair of Power connectors
- Order new DB50 connectors, made to crimp on Ribbon cable, order a 50circuit foot long SCSI cable, lose the installed ends, crimp the DB50 on, and apply appropriate connectors to fit to the headers on the Carbide Motion Controller board. Add a right angle usb plug, and a 4pin Power connector

To prepare for all of this I needed to Get some supplies on order.
- A second Carbide Motion Controller, so I contacted Carbide 3D sales via email, and Jorge(he is a really good egg!) emailed me back with the treasure map to ordering a second controller and after a few minutes. I had a second controller board on the way!
- Connectors (still hunting Stepper Connectors) But others are on the way!
- SCSI Ribbon Cable 60 trace on the way(seriously cheaper than a 50 trace version) on the way!
- Two Right angle usb plugs on the way!
- Several Power connectors on the way!
If you see something I missed, sharpen a stick and poke me with it!
Also in keeping with the Mayberry theme, I believe I can see several of you in this clip,see if you can?