Aha ![]()
It’s more the other bits of the Shapeoko picking up the EMI from the motor wires that might be the issue, guess you’ll find out when you wire it up though and you can always switch over to screened motor cable later.
Aha ![]()
It’s more the other bits of the Shapeoko picking up the EMI from the motor wires that might be the issue, guess you’ll find out when you wire it up though and you can always switch over to screened motor cable later.
yup. Though I have already started looking around for some.
Especially if they share the drag chain(s)! ![]()
Well got the ODrive wired up and configured the best I can. It goes through the calibration system and even spins the motor a little bit. It fails though when trying to configure the hall sensors. Hoping the 8 feet of wire for the hall sensors is not the issue.
Looks like the issue is in the driver code. I do not think they every thought the ODrive would be used on a motor with so few pole pairs. The calibration is spinning the motor only 1/16th of a turn, but the code is expecting 8 pulses from the hall sensors. This requires spinning the shaft 2/3rds of a turn.
Working much better now:
Had to increase the calibration current. Now the only issue is that if I go above 1500 RPM the ODrive goes into an error state. I think this is because I do not have the velocity tuning parameters just right.
Was looking at some BLDC motors and I accidentally found this, which would make a serious spindle (or small motorcycle).
You’d need at least a 48V power supply but yes that would work quite well.
Well the ODrive is giving me a ERROR_CURRENT_UNSTABLE error when I try to go above 2500 RPM now. One neat thing though is I can get it to spin at 75 RPM which I never thought would be possible.
It is working! Got up to 20K RPM which is as fast as I care to go with my partially disassembled router outside my enclosure. Finishing up the rewire and then going to see about making some chips.
Once that is done I will take the Ardiuno code I have and adapt it to the ODrive.
That’s awesome news, definitely subscribed for chips!
What’s the next step? Configure the Liveplotter and tuning?
Currently I am looking for the four screws that hold the metal part onto the plastic. They have gotten lost in the sea of crap on my desk. After that I need to finish the rewire. Then tune while making some chips.
I am familiar with that situation, rising sea level is more of a problem than we expect ![]()
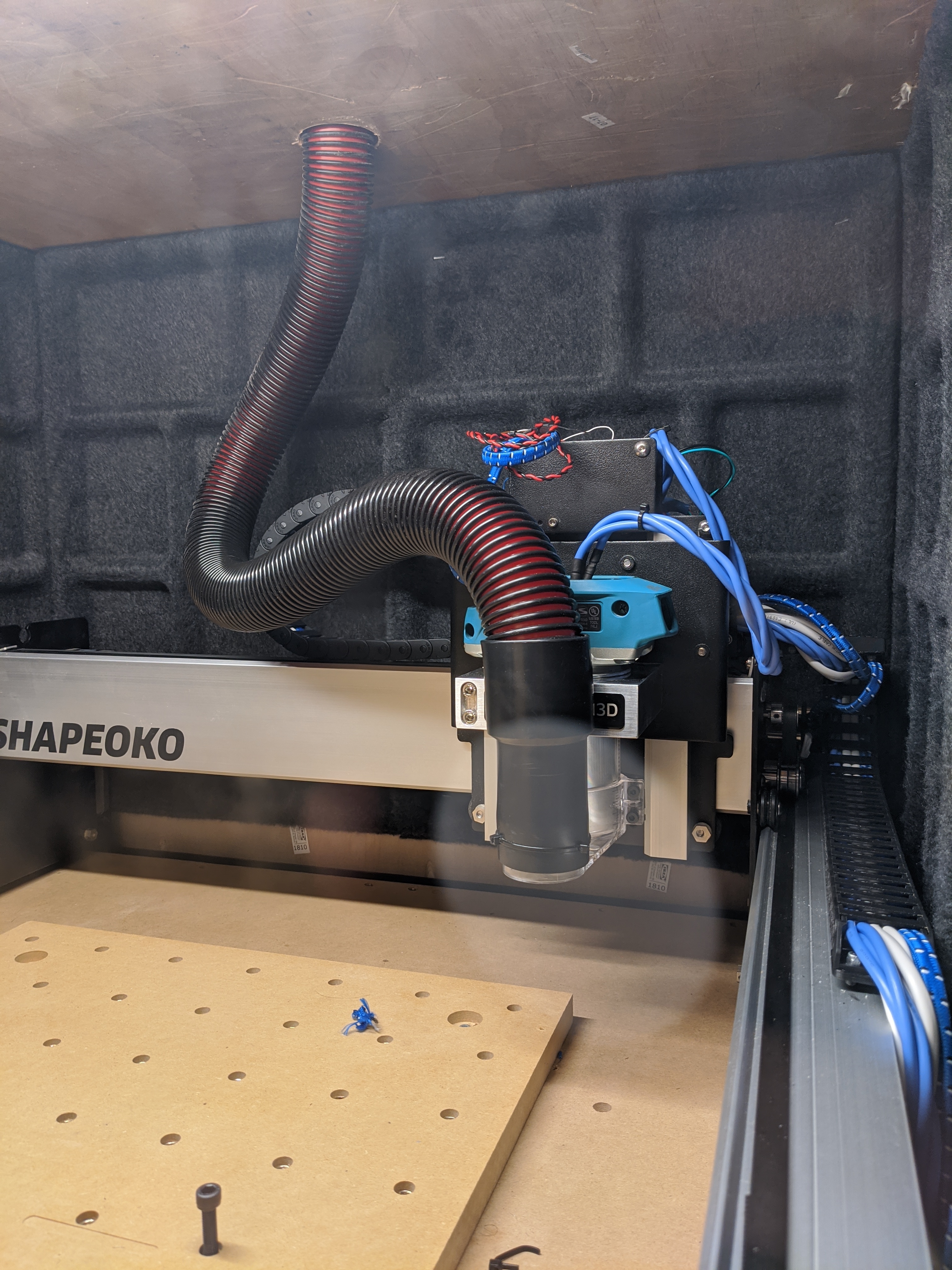
Need to figure out how to keep the vacuum hose and the drag chain from fighting. The drag chain keeps telling the vacuum it sucks. (Can you tell I’m a father?)
Piece of elastic string attached to the ceiling, pulling the hose slightly away from the back ?
First “chips” :
My HDPE recipe needs improvement or the RPM was not correct. I’m leaning towards the recipe
The RPM was set through the odrivetool. Still need to get the arduino code working. Also might need to get a bigger powersupply and run the Shapeoko off the same PS as the ODrive. They do not like sharing GND through the arduino.
…
Faster!
Faster how? RPM or Feed?
Sorry, feed. I couldn’t guess your speed from the video.
What’s your depth of cut?