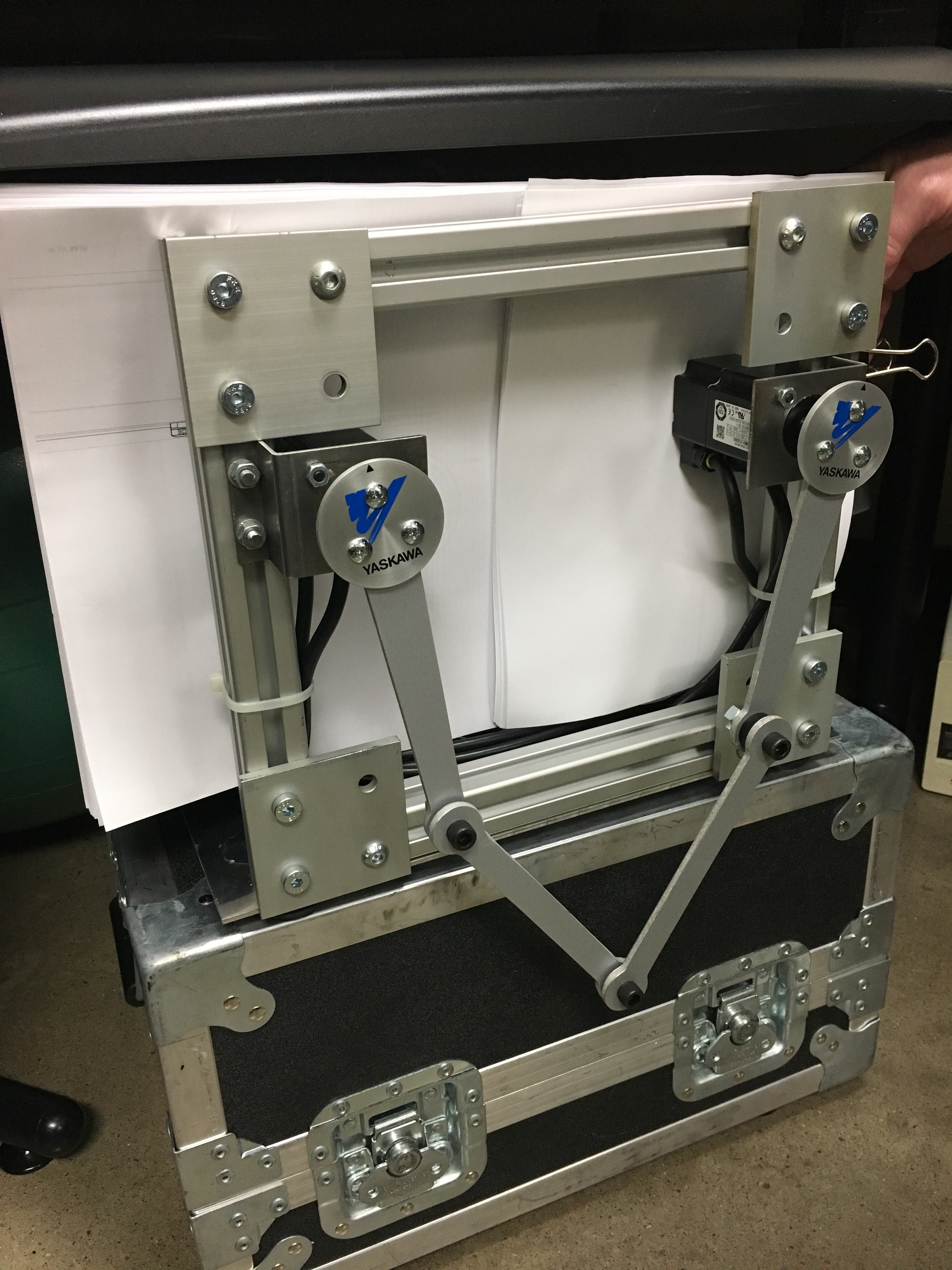
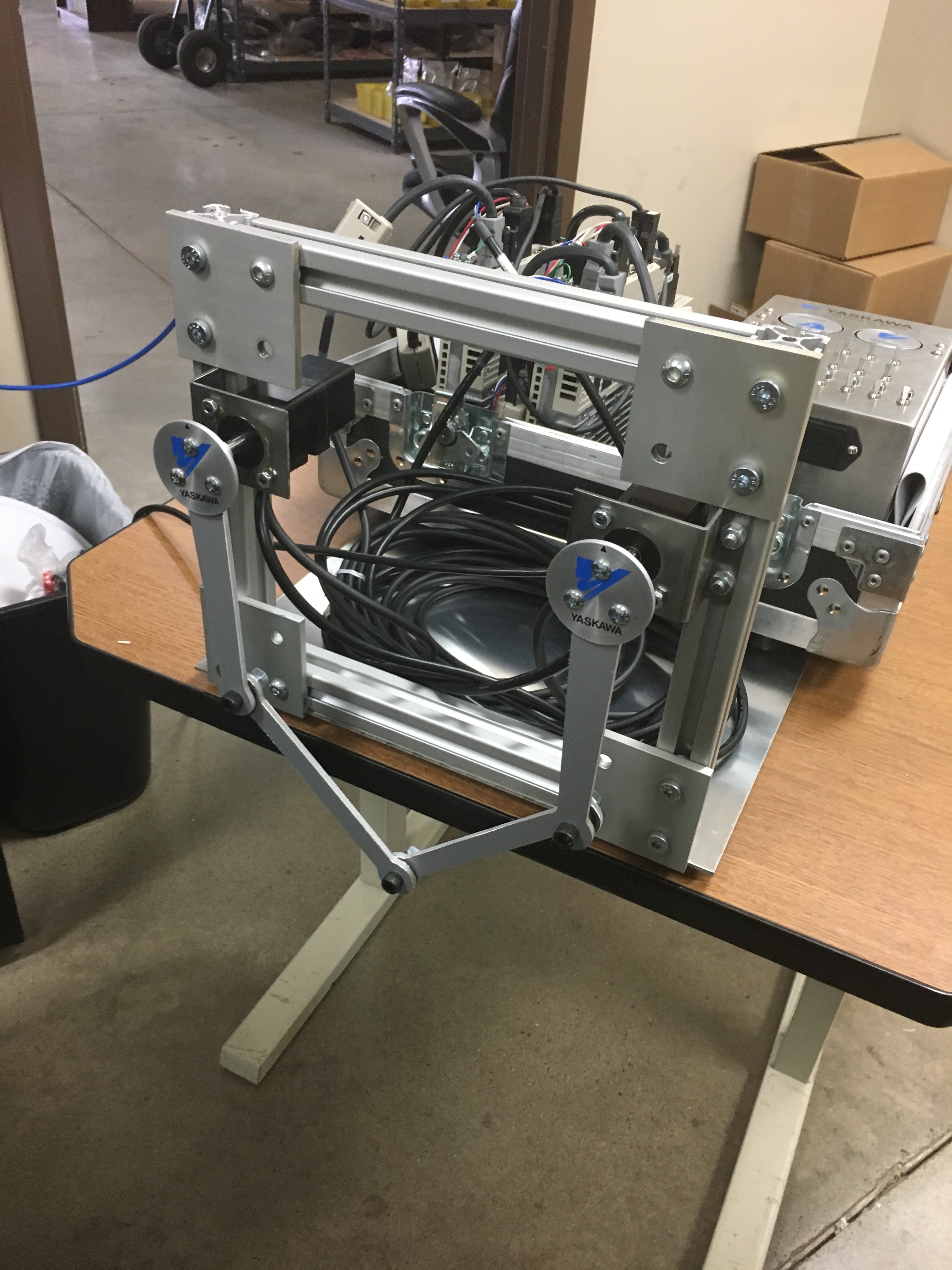
Here are a couple of pictures of some arms we made on the Nomad. These were made to prove out the forward and inverse kinematics code for a Delta 2 (five bar) robot. These are attached to small industrial servo motors. Once the motion program is proven the software will be deployed to a full scale unit used in a production setting.
This is just to show another way these small machines bring value to real world industrial applications.