Does grbl automatically square gantry when SO5 initializes?
I checked all hardware, verified gantry is installed tight against stops on Y rails.
Almost 3/32 out of square on 23 1/2 inch X axis run.
Unless something changed since I last checked the answer is no. The best your gonna get is a macro or manually with the machine off then adjusting any offset thats needed (if any is) within whatever software suite your running.
Grbl squares against the homing switch position — but that assumes the machine itself is square.
I recently had a crash which was so hard it knocked my machine visibly out-of-square.
Remove all the MDF filler strips, loosen all the hardware securing them and the Y-axis rails, then measure the diagonals. Gently push/pull/nudge until the two are equal and the two Y-axis rails are parallel and at right angles to the gantry when the gantry an equal distance from each Y-axis homing switch, then re-tighten all the hardware in a random pattern, ensuring that things stay square.
4 Likes
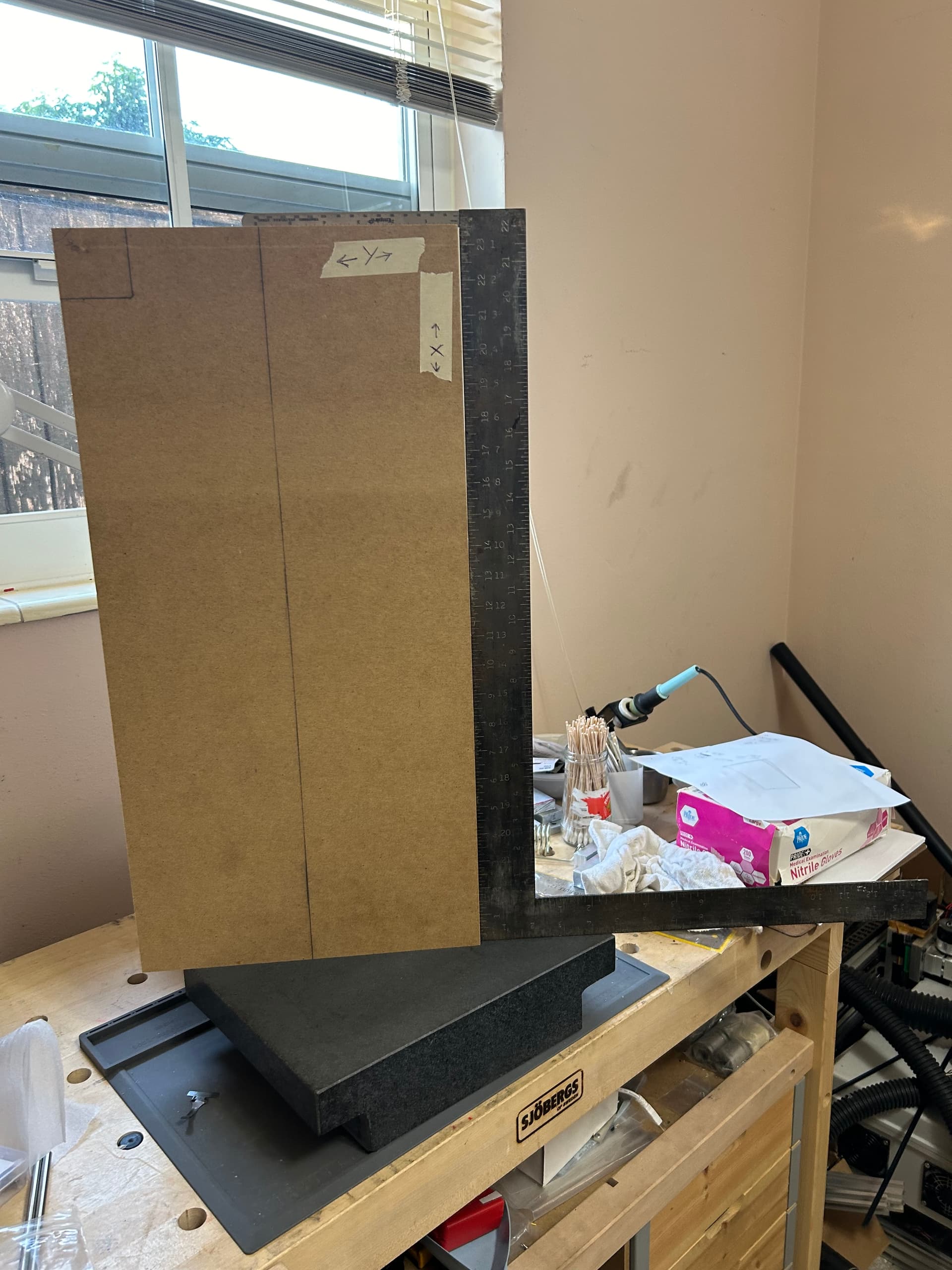
Diagonals off by 1/16". Made adjustments. I got both diagonal measurements to 60 1/32". Measurements taken from outside Y rail t tracks.
Made test cut with same results.
Is this telling me the Y1 Y2 position switches need to be adjusted?
Am I expecting too much from this machine?
Any help appreciated.
Please check in with support@carbide3d.com
I had to adjust the home sensors for the Y axis on my SO5. There is a screw that can be turned for fine adjustment of the home sensor.
I used a 3D Touch probe to help with adjusting the home sensors. I used the probe to measure the angle on two sides of a square. If the two angles are not equal to each other then you are not square. Placement of the square into the machine does not matter. If you placed the square into the machine rotated 33 degrees then you should measure 33 degrees for both sides of the square.
1 Like
Thanks for the reply. I don’t quite understand your process of measuring angles on two sides of a square for sensor adjustment.
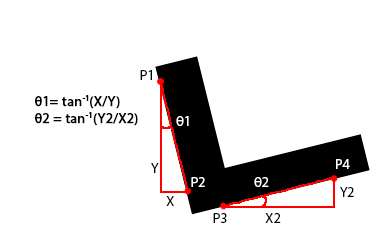
I drew up the below picture as a graphical aid. You want θ1 and θ2 to be equal to each other. You can make fine adjustments to the position of one homing sensor until both angles are equal. Does not really matter which side you choose to make the adjustment on. You know you are adjusting in the wrong direction if the angle difference between both sides increases.
4 Likes
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.