Phew!! Finally, that did it. Now Rapid positioning is working. Thanks Jorge for your help.
Hi,
I received my nomad today and I ot this message too. Tried to enter $# as suggested anf then /G10L2P6X-123.815Y-107.850Z-127.000 but nothing seems to happen when I lick send on either occassion. Can someone help please?
Could you please go through step-by-step:
- what you did (and on the basis of what documentation)
- what you expected to happen
- what actually happened
I am going through set up.
- connect usb
2.power up nomad - start up carbide motion
- connect cutter
- load 1st tutorial (wrench)
- Click Jog
- Begin homing
- Click to measure tool
- Machine parameters invalid message displayed
If I try and move the cutter to the lower left-hand corner of the stock, I can only job the machine a few moves and then it stops responding.
I searched the forum for previous issues and it was suggested that I go to MDI>$# and send to check G59 value and then cut and paste /G10L2P6X-123.815Y-107.850Z-127.000and send. nothing happens when I click send either time
@WillAdams
Thanks
Eve
Very disappointed here. Can support please come back to me please? So far I haven’t been able to start the first tutorial!
Support is on Midwest / Chicago time — please contact support@carbide3d.com to get in the official support queue — hopefully someone will be able to get back to you.
In the meanwhile you could check your machine setup against the typical Nomad defaults (which I’m afraid I can’t find a link for) — any documentation on this included w/ your machine?
Yes, I have emailed, thank you. Not a lot of documentation I’m afraid. How would I go about changing G28? Any ideas?
@vauxleather, like will said email support@, but in the mean time type /G10L2P5X553Y883Z-106.000
Then check the log that G58 now has values populated. This should get you going.
@Jorge Thank you! Thats fixed it!
1 Like
@Jorge
Well, it fixed the invalid parameter issue but now I cannot start the job./…
For documentation on G-code please see: http://www.shapeoko.com/wiki/index.php/G-Code — we do have a basic page on the Nomad on the wiki: http://www.shapeoko.com/wiki/index.php/Nomad_883
I suspect that the defaults on your machine aren’t set right — if you could find the proper ones for the Nomad, then compare them to your machine’s current settings and then update them appropriately, I’m sure things would then “just work”.
So I got past the invalid parameters problem, now the machine will start the wrench tutorial job and stop half way through or maybe not even start, like theres a com issue. When it stops the spindle is still spinning, it just stops moving through.
Electronic disconnects have been a significant percentage of the problems which have been reported. Recommendations from the Shapeoko side of the house here: http://www.shapeoko.com/wiki/index.php/Electronics#Recommendations
Please try the solutions which you feel apply to the Nomad and which you are comfortable doing — if they don’t work, contact support@carbide3d.com and let them know what you’ve tried and they will be able to work w/ you to puzzle out the specifics of your situation and the solution for your machine and environs.
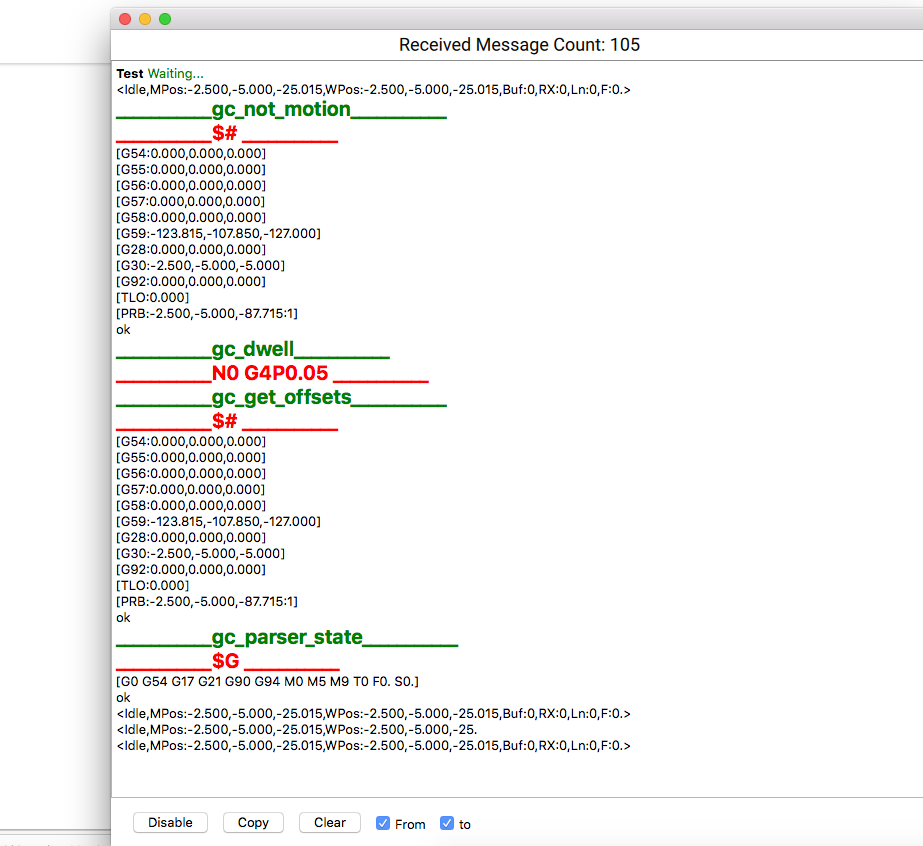
Here it stopped at line 12:
Test Waiting…
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: RUNNING
gc_clear_optional_block_skip
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:0,RX:0,Ln:0,F:0.>
gc_parser_state
___________$G ___________
[G0 G54 G17 G21 G90 G94 M0 M5 M9 T0 F0. S0.]
ok
gc_spindle
___________M05 ___________
gc_wait_for_idle
___________N0 G4P0.005 ___________
gc_homing
___________$h ___________
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:1,RX:0,Ln:-1,F:0.>
<Run,MPos:0.000,0.000,-2.100,WPos:0.000,0.000,-2.100,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:0.000,0.000,-4.990,WPos:0.000,0.000,-4.990,Buf:0,RX:0,Ln:0,F:28.>
<Idle,MPos:0.000,0.000,-5.000,WPos:0.000,0.000,-5.000,Buf:1,RX:0,Ln:-1,F:0.>
<Run,MPos:-0.280,-0.280,-5.000,WPos:-0.280,-0.280,-5.000,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:-2.630,-2.630,-5.000,WPos:-2.630,-2.630,-5.000,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:-4.930,-4.930,-5.000,WPos:-4.930,-4.930,-5.000,Buf:0,RX:0,Ln:0,F:181.>
ok
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_wait_for_idle
___________N3 G4P0.005 ___________
ok
gc_units(INCH)
gc_wait_for_idle
___________N4 G4P0.005 ___________
gc_distance_mode(ABSOLUTE)
gc_simulation_tool
gc_comment
gc_comment
gc_spindle
___________M05 ___________
gc_dwell
___________N6 G4P2 ___________
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
ok
gc_comment
gc_motion
___________N6G0Z-5.000 ___________
gc_motion
___________N6G0X-120.000 ___________
gc_wait_for_idle
___________N6 G4P0.005 ___________
<Run,MPos:-5.665,-5.000,-5.000,WPos:-5.665,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1944.>
<Run,MPos:-13.230,-5.000,-5.000,WPos:-13.230,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-21.925,-5.000,-5.000,WPos:-21.925,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-30.530,-5.000,-5.000,WPos:-30.530,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-39.230,-5.000,-5.000,WPos:-39.230,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-47.845,-5.000,-5.000,WPos:-47.845,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-56.565,-5.000,-5.000,WPos:-56.565,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-65.170,-5.000,-5.000,WPos:-65.170,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-73.865,-5.000,-5.000,WPos:-73.865,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-82.490,-5.000,-5.000,WPos:-82.490,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-91.360,-5.000,-5.000,WPos:-91.360,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-99.810,-5.000,-5.000,WPos:-99.810,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-108.485,-5.000,-5.000,WPos:-108.485,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-117.225,-5.000,-5.000,WPos:-117.225,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1528.>
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_tool
SET MACHINE STATE: WAIT_FOR_PAUSE
gc_cancel_tool_length
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: PAUSED
SET MACHINE STATE: RUNNING
gc_spindle
___________M05 ___________
ok
gc_motion
___________N6G0Z-5.000 ___________
gc_motion
___________N6G0X-2.500Z-5.000 ___________
gc_motion
___________N6G0Z-35.000 ___________
gc_do_tool_probe
___________N6G38.2Z-105.000F800.0 ___________
<Run,MPos:-117.025,-5.000,-5.000,WPos:-117.025,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-108.345,-5.000,-5.000,WPos:-108.345,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-99.755,-5.000,-5.000,WPos:-99.755,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-91.030,-5.000,-5.000,WPos:-91.030,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-82.400,-5.000,-5.000,WPos:-82.400,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-73.740,-5.000,-5.000,WPos:-73.740,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-65.135,-5.000,-5.000,WPos:-65.135,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-56.420,-5.000,-5.000,WPos:-56.420,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-47.810,-5.000,-5.000,WPos:-47.810,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-39.080,-5.000,-5.000,WPos:-39.080,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-30.490,-5.000,-5.000,WPos:-30.490,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-21.790,-5.000,-5.000,WPos:-21.790,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-13.190,-5.000,-5.000,WPos:-13.190,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-4.645,-5.000,-5.000,WPos:-4.645,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:1338.>
<Run,MPos:-2.500,-5.000,-6.240,WPos:-2.500,-5.000,-6.240,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-10.510,WPos:-2.500,-5.000,-10.510,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-14.710,WPos:-2.500,-5.000,-14.710,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-18.965,WPos:-2.500,-5.000,-18.965,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-23.165,WPos:-2.500,-5.000,-23.165,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-27.455,WPos:-2.500,-5.000,-27.455,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-31.625,WPos:-2.500,-5.000,-31.625,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-35.000,WPos:-2.500,-5.000,-35.000,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-37.325,WPos:-2.500,-5.000,-37.325,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-40.010,WPos:-2.500,-5.000,-40.010,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-42.670,WPos:-2.500,-5.000,-42.670,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-45.345,WPos:-2.500,-5.000,-45.345,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-47.985,WPos:-2.500,-5.000,-47.985,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-50.675,WPos:-2.500,-5.000,-50.675,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-53.330,WPos:-2.500,-5.000,-53.330,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-55.995,WPos:-2.500,-5.000,-55.995,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-58.655,WPos:-2.500,-5.000,-58.655,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-61.340,WPos:-2.500,-5.000,-61.340,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-63.985,WPos:-2.500,-5.000,-63.985,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-66.650,WPos:-2.500,-5.000,-66.650,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-69.330,WPos:-2.500,-5.000,-69.330,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-71.970,WPos:-2.500,-5.000,-71.970,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-74.650,WPos:-2.500,-5.000,-74.650,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-77.320,WPos:-2.500,-5.000,-77.320,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-79.975,WPos:-2.500,-5.000,-79.975,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-82.655,WPos:-2.500,-5.000,-82.655,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-85.305,WPos:-2.500,-5.000,-85.305,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-87.980,WPos:-2.500,-5.000,-87.980,Buf:1,RX:0,Ln:6,F:476.>
[PRB:-2.500,-5.000,-87.730:1]
ok
<Idle,MPos:-2.500,-5.000,-88.600,WPos:-2.500,-5.000,-88.600,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-2.500,-5.000,-88.600,WPos:-2.500,-5.000,-88.600,Buf:0,RX:0,Ln:0,F:0.>
gc_distance_mode(INCREMENTAL)
gc_motion
___________N6G0Z-85.600 ___________
ok
gc_distance_mode(ABSOLUTE)
gc_do_tool_probe
___________N6G38.2Z-188.600F200.0 ___________
<Run,MPos:-2.500,-5.000,-85.780,WPos:-2.500,-5.000,-85.780,Buf:0,RX:0,Ln:0,F:2.>
<Run,MPos:-2.500,-5.000,-86.120,WPos:-2.500,-5.000,-86.120,Buf:1,RX:0,Ln:6,F:200.>
<Run,MPos:-2.500,-5.000,-86.785,WPos:-2.500,-5.000,-86.785,Buf:1,RX:0,Ln:6,F:200.>
<Run,MPos:-2.500,-5.000,-87.460,WPos:-2.500,-5.000,-87.460,Buf:1,RX:0,Ln:6,F:200.>
[PRB:-2.500,-5.000,-87.725:1]
ok
<Idle,MPos:-2.500,-5.000,-87.895,WPos:-2.500,-5.000,-87.895,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-2.500,-5.000,-87.895,WPos:-2.500,-5.000,-87.895,Buf:0,RX:0,Ln:0,F:0.>
gc_motion
___________N6G0Z-5.000 ___________
ok
gc_motion
___________N6G0X-8.000 ___________
gc_apply_reference_tool
gc_wait_for_idle
___________N6 G4P0.005 ___________
<Run,MPos:-2.500,-5.000,-84.860,WPos:-2.500,-5.000,-84.860,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-80.610,WPos:-2.500,-5.000,-80.610,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-76.395,WPos:-2.500,-5.000,-76.395,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-72.150,WPos:-2.500,-5.000,-72.150,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-67.930,WPos:-2.500,-5.000,-67.930,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-63.645,WPos:-2.500,-5.000,-63.645,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-59.465,WPos:-2.500,-5.000,-59.465,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-55.220,WPos:-2.500,-5.000,-55.220,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-51.000,WPos:-2.500,-5.000,-51.000,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-46.755,WPos:-2.500,-5.000,-46.755,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-42.540,WPos:-2.500,-5.000,-42.540,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-38.295,WPos:-2.500,-5.000,-38.295,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-34.095,WPos:-2.500,-5.000,-34.095,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-29.845,WPos:-2.500,-5.000,-29.845,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-25.635,WPos:-2.500,-5.000,-25.635,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-21.375,WPos:-2.500,-5.000,-21.375,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-17.170,WPos:-2.500,-5.000,-17.170,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-12.915,WPos:-2.500,-5.000,-12.915,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-8.700,WPos:-2.500,-5.000,-8.700,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-5.005,WPos:-2.500,-5.000,-5.005,Buf:1,RX:0,Ln:6,F:865.>
<Run,MPos:-7.225,-5.000,-5.000,WPos:-7.225,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:530.>
ok
<Idle,MPos:-8.000,-5.000,-5.000,WPos:-8.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_sync
gc_motion
___________N6G0X-120.000 ___________
ok
gc_comment
gc_spindle
___________M03S8000 ___________
<Run,MPos:-12.475,-5.000,-5.000,WPos:-12.475,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-21.080,-5.000,-5.000,WPos:-21.080,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-29.735,-5.000,-5.000,WPos:-29.735,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-38.410,-5.000,-5.000,WPos:-38.410,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-47.060,-5.000,-5.000,WPos:-47.060,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-55.740,-5.000,-5.000,WPos:-55.740,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-64.385,-5.000,-5.000,WPos:-64.385,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-73.045,-5.000,-5.000,WPos:-73.045,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-81.665,-5.000,-5.000,WPos:-81.665,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-90.365,-5.000,-5.000,WPos:-90.365,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-99.020,-5.000,-5.000,WPos:-99.020,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-107.680,-5.000,-5.000,WPos:-107.680,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-116.300,-5.000,-5.000,WPos:-116.300,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2027.>
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_dwell
___________N7 G4P2 ___________
ok
gc_motion
___________N8G0X-212.100Y-188.100Z-89.580 ___________
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
ok
gc_comment
gc_comment
gc_motion
___________N10G0X-208.356Y-181.585 ___________
gc_motion
___________N11G1Z-92.755F127.0 ___________
gc_motion
___________N12G1F381.0 ___________
gc_motion
___________N13G1X-209.118Y-181.087 ___________
<Run,MPos:-121.295,-7.575,-6.190,WPos:-121.295,-7.575,-6.190,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-125.620,-16.170,-10.160,WPos:-125.620,-16.170,-10.160,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-129.970,-24.820,-14.155,WPos:-129.970,-24.820,-14.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-134.325,-33.480,-18.155,WPos:-134.325,-33.480,-18.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-138.680,-42.135,-22.155,WPos:-138.680,-42.135,-22.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-143.010,-50.750,-26.135,WPos:-143.010,-50.750,-26.135,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-147.415,-59.505,-30.180,WPos:-147.415,-59.505,-30.180,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-151.725,-68.070,-34.135,WPos:-151.725,-68.070,-34.135,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-156.110,-76.790,-38.160,WPos:-156.110,-76.790,-38.160,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-160.455,-85.430,-42.155,WPos:-160.455,-85.430,-42.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-164.815,-94.090,-46.155,WPos:-164.815,-94.090,-46.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-169.170,-102.755,-50.155,WPos:-169.170,-102.755,-50.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-173.520,-111.405,-54.150,WPos:-173.520,-111.405,-54.150,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-177.880,-120.070,-58.155,WPos:-177.880,-120.070,-58.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-182.215,-128.685,-62.135,WPos:-182.215,-128.685,-62.135,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-186.590,-137.380,-66.150,WPos:-186.590,-137.380,-66.150,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-190.945,-146.045,-70.155,WPos:-190.945,-146.045,-70.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-195.300,-154.705,-74.155,WPos:-195.300,-154.705,-74.155,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-199.645,-163.340,-78.145,WPos:-199.645,-163.340,-78.145,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-203.995,-171.985,-82.135,WPos:-203.995,-171.985,-82.135,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-208.380,-180.700,-86.160,WPos:-208.380,-180.700,-86.160,Buf:4,RX:0,Ln:8,F:3148.>
<Run,MPos:-211.925,-187.750,-89.420,WPos:-211.925,-187.750,-89.420,Buf:4,RX:0,Ln:8,F:116.>
<Run,MPos:-210.225,-184.835,-89.580,WPos:-210.225,-184.835,-89.580,Buf:3,RX:0,Ln:10,F:1998.>
<Run,MPos:-208.355,-181.585,-89.690,WPos:-208.355,-181.585,-89.690,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.110,WPos:-208.355,-181.585,-90.110,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.535,WPos:-208.355,-181.585,-90.535,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.965,WPos:-208.355,-181.585,-90.965,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-91.380,WPos:-208.355,-181.585,-91.380,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-91.805,WPos:-208.355,-181.585,-91.805,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-92.235,WPos:-208.355,-181.585,-92.235,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-92.650,WPos:-208.355,-181.585,-92.650,Buf:2,RX:0,Ln:11,F:127.>
<Run,MPos:-209.110,-181.090,-92.755,WPos:-209.110,-181.090,-92.755,Buf:0,RX:0,Ln:0,F:158.>
<Idle,MPos:-209.120,-181.085,-92.755,WPos:-209.120,-181.085,-92.755,Buf:0,RX:0,Ln:0,F:0.>
,-92.755,WPos:-209.120,-181.085,-92.755,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-209.120,-181.085,-92.755,WPos:-209.120,-181.085,-92.755,Buf:0,RX:0,Ln:0,F:0.>
Her it wouldnt start at all:
Test Waiting…
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: RUNNING
gc_clear_optional_block_skip
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:0,RX:0,Ln:0,F:0.>
gc_parser_state
___________$G ___________
[G0 G54 G17 G21 G90 G94 M0 M5 M9 T0 F0. S0.]
ok
gc_spindle
___________M05 ___________
gc_wait_for_idle
___________N0 G4P0.005 ___________
gc_homing
___________$h ___________
<Idle,MPos:0.000,0.000,0.000,WPos:0.000,0.000,0.000,Buf:1,RX:0,Ln:-1,F:0.>
<Run,MPos:0.000,0.000,-1.845,WPos:0.000,0.000,-1.845,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:0.000,0.000,-4.940,WPos:0.000,0.000,-4.940,Buf:0,RX:0,Ln:0,F:28.>
<Idle,MPos:0.000,0.000,-5.000,WPos:0.000,0.000,-5.000,Buf:1,RX:0,Ln:-1,F:0.>
<Run,MPos:-0.025,-0.025,-5.000,WPos:-0.025,-0.025,-5.000,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:-2.255,-2.255,-5.000,WPos:-2.255,-2.255,-5.000,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:-4.605,-4.605,-5.000,WPos:-4.605,-4.605,-5.000,Buf:1,RX:0,Ln:-1,F:181.>
ok
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_wait_for_idle
___________N3 G4P0.005 ___________
ok
gc_units(INCH)
gc_wait_for_idle
___________N4 G4P0.005 ___________
gc_distance_mode(ABSOLUTE)
gc_simulation_tool
gc_comment
gc_comment
gc_spindle
___________M05 ___________
gc_dwell
___________N6 G4P2 ___________
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
ok
gc_comment
gc_motion
___________N6G0Z-5.000 ___________
gc_motion
___________N6G0X-120.000 ___________
gc_wait_for_idle
___________N6 G4P0.005 ___________
<Run,MPos:-5.965,-5.000,-5.000,WPos:-5.965,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2106.>
<Run,MPos:-13.850,-5.000,-5.000,WPos:-13.850,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-22.465,-5.000,-5.000,WPos:-22.465,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-31.145,-5.000,-5.000,WPos:-31.145,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-39.855,-5.000,-5.000,WPos:-39.855,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-48.465,-5.000,-5.000,WPos:-48.465,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-57.140,-5.000,-5.000,WPos:-57.140,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-65.810,-5.000,-5.000,WPos:-65.810,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-74.440,-5.000,-5.000,WPos:-74.440,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-83.105,-5.000,-5.000,WPos:-83.105,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-91.760,-5.000,-5.000,WPos:-91.760,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-100.380,-5.000,-5.000,WPos:-100.380,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-109.065,-5.000,-5.000,WPos:-109.065,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-117.630,-5.000,-5.000,WPos:-117.630,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1366.>
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_tool
SET MACHINE STATE: WAIT_FOR_PAUSE
gc_cancel_tool_length
gc_wait_for_idle
___________N6 G4P0.005 ___________
o<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: PAUSED
SET MACHINE STATE: RUNNING
s:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
00,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
20.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000n:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: WAIT_FOR_PAUSE
SET MACHINE STATE: PAUSED
GRBL_FEEDHOLD
GRBL_RESET
SET MACHINE STATE: INIT
[Check Door]
SET MACHINE STATE: DOOR_PAUSE
nCarbideMotion 0.9h
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: INIT
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_homing
___________$h ___________
<Idle,MPos:-120.000,-5.000,0.000,WPos:-120.000,-5.000,0.000,Buf:1,RX:0,Ln:-1,F:0.>
<Run,MPos:-120.000,-5.000,-2.135,WPos:-120.000,-5.000,-2.135,Buf:1,RX:0,Ln:-1,F:1000.>
<Run,MPos:-120.000,-5.000,-4.995,WPos:-120.000,-5.000,-4.995,Buf:0,RX:0,Ln:0,F:28.>
Her eit stopped at line 17:
Test Waiting…
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: RUNNING
gc_clear_optional_block_skip
gc_wait_for_idle
___________N0 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_parser_state
___________$G ___________
[G0 G54 G17 G21 G90 G94 M0 M5 M9 T0 F0. S0.]
ok
gc_spindle
___________M05 ___________
gc_wait_for_idle
___________N0 G4P0.005 ___________
gc_homing
gc_wait_for_idle
___________N0 G4P0.005 ___________
gc_sync
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_comment
gc_wait_for_idle
___________N3 G4P0.005 ___________
ok
gc_units(INCH)
gc_wait_for_idle
___________N4 G4P0.005 ___________
gc_distance_mode(ABSOLUTE)
gc_simulation_tool
gc_comment
gc_comment
gc_spindle
___________M05 ___________
gc_dwell
___________N6 G4P2 ___________
<Idle,MPos:-5.000,-5.000,-5.000,WPos:-5.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
ok
gc_comment
gc_motion
___________N6G0Z-5.000 ___________
gc_motion
___________N6G0X-120.000 ___________
gc_wait_for_idle
___________N6 G4P0.005 ___________
<Run,MPos:-6.060,-5.000,-5.000,WPos:-6.060,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2106.>
<Run,MPos:-13.965,-5.000,-5.000,WPos:-13.965,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-22.660,-5.000,-5.000,WPos:-22.660,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-31.310,-5.000,-5.000,WPos:-31.310,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-39.985,-5.000,-5.000,WPos:-39.985,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-48.615,-5.000,-5.000,WPos:-48.615,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-57.315,-5.000,-5.000,WPos:-57.315,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-65.920,-5.000,-5.000,WPos:-65.920,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-74.640,-5.000,-5.000,WPos:-74.640,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-83.220,-5.000,-5.000,WPos:-83.220,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-91.960,-5.000,-5.000,WPos:-91.960,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-100.545,-5.000,-5.000,WPos:-100.545,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-109.310,-5.000,-5.000,WPos:-109.310,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-117.760,-5.000,-5.000,WPos:-117.760,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1366.>
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_tool
SET MACHINE STATE: WAIT_FOR_PAUSE
gc_cancel_tool_length
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
SET MACHINE STATE: PAUSED
SET MACHINE STATE: RUNNING
gc_spindle
___________M05 ___________
ok
gc_motion
___________N6G0Z-5.000 ___________
gc_motion
___________N6G0X-2.500Z-5.000 ___________
gc_motion
___________N6G0Z-35.000 ___________
gc_do_tool_probe
___________N6G38.2Z-105.000F800.0 ___________
<Run,MPos:-116.195,-5.000,-5.000,WPos:-116.195,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-107.575,-5.000,-5.000,WPos:-107.575,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-98.875,-5.000,-5.000,WPos:-98.875,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-90.270,-5.000,-5.000,WPos:-90.270,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-81.570,-5.000,-5.000,WPos:-81.570,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-72.920,-5.000,-5.000,WPos:-72.920,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-64.205,-5.000,-5.000,WPos:-64.205,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-55.635,-5.000,-5.000,WPos:-55.635,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-46.945,-5.000,-5.000,WPos:-46.945,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-38.320,-5.000,-5.000,WPos:-38.320,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-29.605,-5.000,-5.000,WPos:-29.605,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-20.970,-5.000,-5.000,WPos:-20.970,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-12.280,-5.000,-5.000,WPos:-12.280,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:2600.>
<Run,MPos:-4.060,-5.000,-5.000,WPos:-4.060,-5.000,-5.000,Buf:2,RX:0,Ln:6,F:1014.>
<Run,MPos:-2.500,-5.000,-6.665,WPos:-2.500,-5.000,-6.665,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-10.880,WPos:-2.500,-5.000,-10.880,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-15.145,WPos:-2.500,-5.000,-15.145,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-19.350,WPos:-2.500,-5.000,-19.350,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-23.595,WPos:-2.500,-5.000,-23.595,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-27.815,WPos:-2.500,-5.000,-27.815,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-32.030,WPos:-2.500,-5.000,-32.030,Buf:1,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-35.055,WPos:-2.500,-5.000,-35.055,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-37.605,WPos:-2.500,-5.000,-37.605,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-40.250,WPos:-2.500,-5.000,-40.250,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-42.940,WPos:-2.500,-5.000,-42.940,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-45.590,WPos:-2.500,-5.000,-45.590,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-48.260,WPos:-2.500,-5.000,-48.260,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-50.920,WPos:-2.500,-5.000,-50.920,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-53.595,WPos:-2.500,-5.000,-53.595,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-56.240,WPos:-2.500,-5.000,-56.240,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-58.915,WPos:-2.500,-5.000,-58.915,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-61.580,WPos:-2.500,-5.000,-61.580,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-64.250,WPos:-2.500,-5.000,-64.250,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-66.900,WPos:-2.500,-5.000,-66.900,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-69.575,WPos:-2.500,-5.000,-69.575,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-72.230,WPos:-2.500,-5.000,-72.230,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-74.940,WPos:-2.500,-5.000,-74.940,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-77.560,WPos:-2.500,-5.000,-77.560,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-80.245,WPos:-2.500,-5.000,-80.245,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-82.930,WPos:-2.500,-5.000,-82.930,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-85.555,WPos:-2.500,-5.000,-85.555,Buf:1,RX:0,Ln:6,F:800.>
<Run,MPos:-2.500,-5.000,-88.220,WPos:-2.500,-5.000,-88.220,Buf:1,RX:0,Ln:6,F:152.>
[PRB:-2.500,-5.000,-87.715:1]
ok
<Idle,MPos:-2.500,-5.000,-88.600,WPos:-2.500,-5.000,-88.600,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-2.500,-5.000,-88.600,WPos:-2.500,-5.000,-88.600,Buf:0,RX:0,Ln:0,F:0.>
gc_distance_mode(INCREMENTAL)
gc_motion
___________N6G0Z-85.600 ___________
ok
gc_distance_mode(ABSOLUTE)
gc_do_tool_probe
___________N6G38.2Z-188.600F200.0 ___________
<Run,MPos:-2.500,-5.000,-85.775,WPos:-2.500,-5.000,-85.775,Buf:0,RX:0,Ln:0,F:2.>
<Run,MPos:-2.500,-5.000,-86.120,WPos:-2.500,-5.000,-86.120,Buf:1,RX:0,Ln:6,F:200.>
<Run,MPos:-2.500,-5.000,-86.785,WPos:-2.500,-5.000,-86.785,Buf:1,RX:0,Ln:6,F:200.>
<Run,MPos:-2.500,-5.000,-87.450,WPos:-2.500,-5.000,-87.450,Buf:1,RX:0,Ln:6,F:200.>
[PRB:-2.500,-5.000,-87.710:1]
ok
<Idle,MPos:-2.500,-5.000,-87.865,WPos:-2.500,-5.000,-87.865,Buf:0,RX:0,Ln:0,F:0.>
gc_wait_for_idle
___________N6 G4P0.005 ___________
ok
gc_sync
<Idle,MPos:-2.500,-5.000,-87.865,WPos:-2.500,-5.000,-87.865,Buf:0,RX:0,Ln:0,F:0.>
gc_motion
___________N6G0Z-5.000 ___________
ok
gc_motion
___________N6G0X-8.000 ___________
gc_apply_reference_tool
gc_wait_for_idle
___________N6 G4P0.005 ___________
<Run,MPos:-2.500,-5.000,-84.810,WPos:-2.500,-5.000,-84.810,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-80.585,WPos:-2.500,-5.000,-80.585,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-76.355,WPos:-2.500,-5.000,-76.355,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-72.125,WPos:-2.500,-5.000,-72.125,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-67.905,WPos:-2.500,-5.000,-67.905,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-63.680,WPos:-2.500,-5.000,-63.680,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-59.430,WPos:-2.500,-5.000,-59.430,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-55.195,WPos:-2.500,-5.000,-55.195,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-50.985,WPos:-2.500,-5.000,-50.985,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-46.760,WPos:-2.500,-5.000,-46.760,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-42.515,WPos:-2.500,-5.000,-42.515,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-38.270,WPos:-2.500,-5.000,-38.270,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-34.030,WPos:-2.500,-5.000,-34.030,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-29.805,WPos:-2.500,-5.000,-29.805,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-25.595,WPos:-2.500,-5.000,-25.595,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-21.350,WPos:-2.500,-5.000,-21.350,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-17.145,WPos:-2.500,-5.000,-17.145,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-12.895,WPos:-2.500,-5.000,-12.895,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-8.660,WPos:-2.500,-5.000,-8.660,Buf:2,RX:0,Ln:6,F:1270.>
<Run,MPos:-2.500,-5.000,-5.000,WPos:-2.500,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1027.>
<Run,MPos:-7.285,-5.000,-5.000,WPos:-7.285,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:530.>
ok
<Idle,MPos:-8.000,-5.000,-5.000,WPos:-8.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_sync
gc_motion
___________N6G0X-120.000 ___________
ok
gc_comment
gc_spindle
___________M03S8000 ___________
<Run,MPos:-12.600,-5.000,-5.000,WPos:-12.600,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-21.225,-5.000,-5.000,WPos:-21.225,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-30.000,-5.000,-5.000,WPos:-30.000,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-38.540,-5.000,-5.000,WPos:-38.540,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-47.235,-5.000,-5.000,WPos:-47.235,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-55.865,-5.000,-5.000,WPos:-55.865,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-64.535,-5.000,-5.000,WPos:-64.535,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-73.170,-5.000,-5.000,WPos:-73.170,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-81.855,-5.000,-5.000,WPos:-81.855,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-90.480,-5.000,-5.000,WPos:-90.480,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-99.170,-5.000,-5.000,WPos:-99.170,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-107.785,-5.000,-5.000,WPos:-107.785,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:2600.>
<Run,MPos:-116.490,-5.000,-5.000,WPos:-116.490,-5.000,-5.000,Buf:1,RX:0,Ln:6,F:1865.>
ok
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
gc_dwell
___________N7 G4P2 ___________
ok
gc_motion
___________N8G0X-212.100Y-188.100Z-89.565 ___________
<Idle,MPos:-120.000,-5.000,-5.000,WPos:-120.000,-5.000,-5.000,Buf:0,RX:0,Ln:0,F:0.>
ok
gc_comment
gc_comment
gc_motion
___________N10G0X-208.356Y-181.585 ___________
gc_motion
___________N11G1Z-92.740F127.0 ___________
gc_motion
___________N12G1F381.0 ___________
gc_motion
___________N13G1X-209.118Y-181.087 ___________
gc_motion
___________N14G1X-209.245Y-180.998 ___________
gc_motion
___________N15G1X-209.372Y-180.889 ___________
gc_motion
___________N16G1X-210.571Y-179.787 ___________
<Run,MPos:-121.550,-8.080,-6.425,WPos:-121.550,-8.080,-6.425,Buf:6,RX:20,Ln:8,F:3148.>
ok
gc_motion
___________N17G1X-210.693Y-179.660 ___________
gc_motion
___________N18G1X-210.794Y-179.533 ___________
gc_motion
___________N19G1X-210.896Y-179.403 ___________
<Run,MPos:-125.710,-16.350,-10.240,WPos:-125.710,-16.350,-10.240,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-130.070,-25.020,-14.245,WPos:-130.070,-25.020,-14.245,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-134.425,-33.675,-18.245,WPos:-134.425,-33.675,-18.245,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-138.765,-42.305,-22.230,WPos:-138.765,-42.305,-22.230,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-143.135,-50.995,-26.245,WPos:-143.135,-50.995,-26.245,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-147.490,-59.650,-30.240,WPos:-147.490,-59.650,-30.240,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-151.840,-68.295,-34.235,WPos:-151.840,-68.295,-34.235,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-156.265,-77.100,-38.300,WPos:-156.265,-77.100,-38.300,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-160.560,-85.635,-42.240,WPos:-160.560,-85.635,-42.240,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-164.910,-94.280,-46.235,WPos:-164.910,-94.280,-46.235,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-169.260,-102.930,-50.230,WPos:-169.260,-102.930,-50.230,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-173.620,-111.595,-54.230,WPos:-173.620,-111.595,-54.230,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-177.980,-120.265,-58.235,WPos:-177.980,-120.265,-58.235,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-182.315,-128.890,-62.220,WPos:-182.315,-128.890,-62.220,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-186.695,-137.595,-66.240,WPos:-186.695,-137.595,-66.240,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-191.035,-146.225,-70.225,WPos:-191.035,-146.225,-70.225,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-195.385,-154.870,-74.220,WPos:-195.385,-154.870,-74.220,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-199.750,-163.545,-78.225,WPos:-199.750,-163.545,-78.225,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-204.115,-172.225,-82.235,WPos:-204.115,-172.225,-82.235,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-208.460,-180.865,-86.225,WPos:-208.460,-180.865,-86.225,Buf:10,RX:0,Ln:8,F:3148.>
<Run,MPos:-211.945,-187.795,-89.425,WPos:-211.945,-187.795,-89.425,Buf:10,RX:0,Ln:8,F:116.>
<Run,MPos:-210.125,-184.660,-89.565,WPos:-210.125,-184.660,-89.565,Buf:9,RX:0,Ln:10,F:1998.>
<Run,MPos:-208.355,-181.585,-89.685,WPos:-208.355,-181.585,-89.685,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.105,WPos:-208.355,-181.585,-90.105,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.530,WPos:-208.355,-181.585,-90.530,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-90.950,WPos:-208.355,-181.585,-90.950,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-91.375,WPos:-208.355,-181.585,-91.375,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-91.800,WPos:-208.355,-181.585,-91.800,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-92.225,WPos:-208.355,-181.585,-92.225,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-208.355,-181.585,-92.645,WPos:-208.355,-181.585,-92.645,Buf:8,RX:0,Ln:11,F:127.>
<Run,MPos:-209.155,-181.060,-92.740,WPos:-209.155,-181.060,-92.740,Buf:5,RX:0,Ln:15,F:381.>
<Run,MPos:-210.100,-180.220,-92.740,WPos:-210.100,-180.220,-92.740,Buf:4,RX:0,Ln:16,F:381.>
<Idle,MPos:-210.895,-179.405,-92.740,WPos:-210.895,-179.405,-92.740,Buf:0,RX:0,Ln:0,F:0.>
Ok, we need to troubleshoot a little deeper, so probably better to handle it via the support@ so we can track the ticket. What are your computer specs?
I had the same issue with my new Nomad today. Tried Everything. Just typed in this code and its gone.
Have no idea what it does tho… But the error is gone.
Thanks.