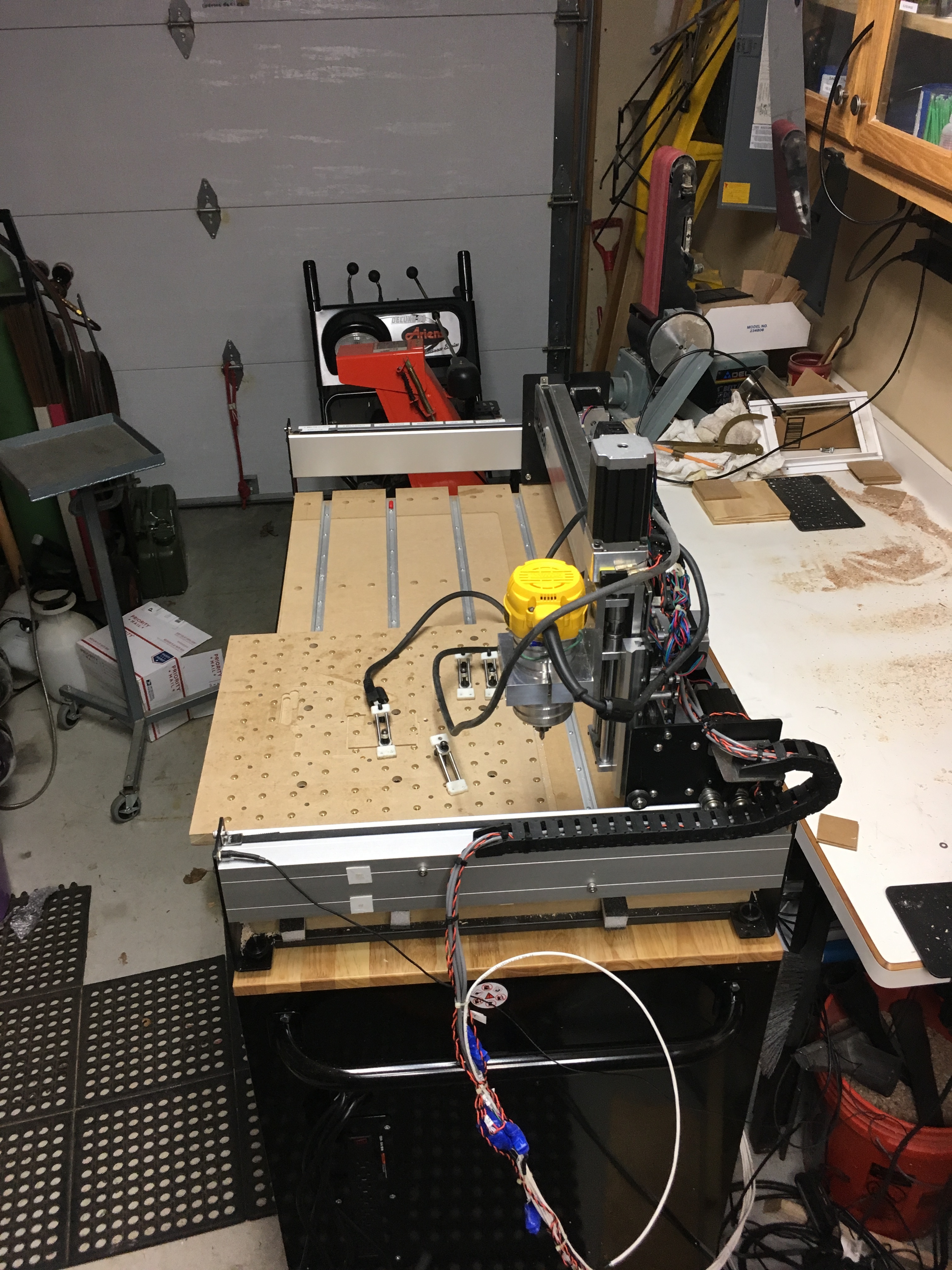
I promised an update when I had things working… new steppers, drives, board and power.
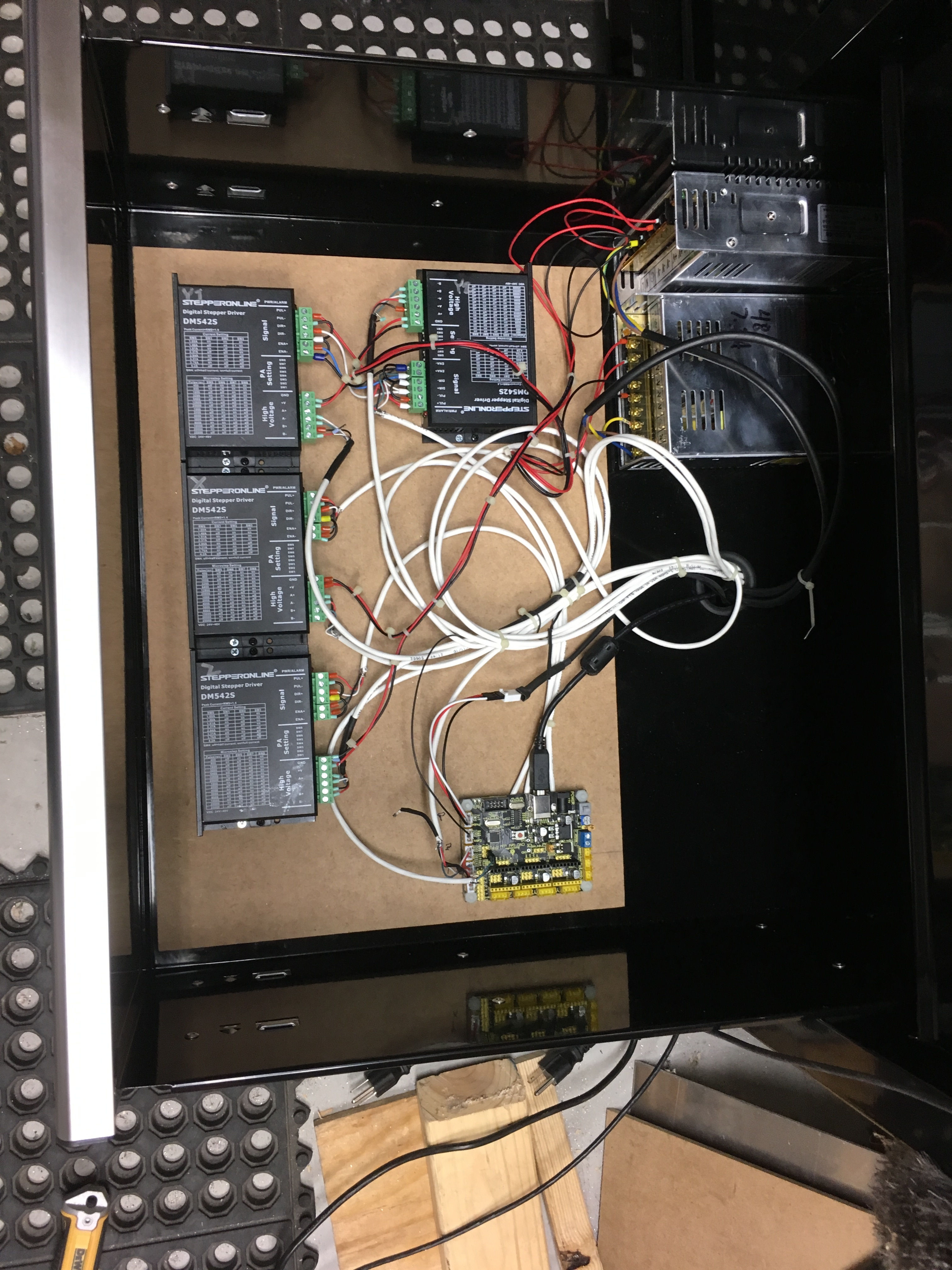
4 DM542S 24-50v, 4A digital stepper drivers ($32 ea),
2 48V PSU’s (7.3 A each) ($23 ea)
1 Keyestudio GRBL board ($20) with GRBL 1.1f loaded.
3 [Nema 23 Bipolar 1.8deg 2.4Nm (340oz.in) 1.8A] (Yx2 and Zx1) ($25 ea)
1 stock stepper (on X - because I was short a pulley)
Total of: ~$255
The only changes SO FAR in the setup of GRBL between my standard board and this one is to reverse the X and Z axis. That could have been done by reversing the A and B coils on the steppers, but I didn’t. The other one was to double all the steps/mm settings - the drivers have a minimum of /2 microstepping.
Mechanical changes (or electrical, depends on how you look at it I guess)
- 4 adapters from the correct connectors on the keyestudio board to the steppers via a DB9 connector. I made these quite long (about 4 ft), and they are shielded. I also made a set of 6" DB9->molex adapters to be able to switch back and forth with the stock Shapeoko controller board (M-DB9 on the stepper cables, then F-DB9->Molex, and F-DB9->ferrules)
- I made an adapter the 3 homing switches plug into, to the appropriate connectors on the keyestudio board (JST)
- These steppers require a different pulley than stock
There was an ask when this came up a few weeks ago if I was seeing any higher forces. Then, it was only a little better than stock, and was using the stock power supply (20v) and stock board. Now, Yes. Yes I am. A lot. Using a luggage scale, I had over 90 pounds on the Y axis, it still hadn’t skipped a step, and my footing wouldn’t afford any more pull while still being able to read the scale. Remember, 2 steppers on Y. I can run some pretty high speeds compared to the stock setup without stalling Y and Z, but I need to do more work quantifying that. My goal here was faster rapids, not really any issue with cutting forces.
The steppers are very quiet compared to the stock setup. I’m not sure if that’s a result of the /2 microstepping, or just inherent in the digital drivers themselves. Stepper noise isn’t exactly a problem compared to router noise, but it’s interesting anyway.
What isn’t working? Spindle control (via PWM to an IOT switch) - What should be working according to the VERY sparse documentation on this board, isn’t. It’s also ugly as all heck, because it’s not in a chassis, so it has boards and cables laying all over. I won’t be able to use carbide motion going forward, but I switched to UGS some months ago anyway, so that doesn’t bother me too much.
Hardest part? Coming up with the right connectors, pins, and tools and building out the adapter cables. I could have just replaced the stock ends, and been done, but I didn’t want to make it hard to go back to the stock board when it all turned out to be a waste of time.
Why? Well, to see if I could I guess. I don’t have a better reason, and that was good enough for me. Oh, and I got my fast rapids.
Tidbits to pass on?
- Neat trick for determining which wires go to which coils: hold two wires together and see if the stepper is hard to move. If yes, those two wires go to the same coil. If no, pick one other wire and try again.
- If the stepper “turns backwards” after being set up on the drive, swap the two coils at the driver. The color codes on stepper wires are unreliable.
- Shielded 4 conductor cable is unreasonably expensive. It’s not horrific, but it’s a lot more expensive than equivalent unshielded cable. It’s also pretty stiff.
- Set up the shields right if you’re going to use shielded cable, only ground at one end.
- Know that high voltage supplies are much more expensive than low voltage supplies with the same current. Higher voltage allows more torque, but you still need the spec’d current on each stepper (No Ohms law advantage). There are diminishing returns, but 48V is a pretty nice compromise, and you can still get supplies with enough current to prevent needing one supply per stepper for a “reasonable” price for my chosen value of “reasonable.”
Hope this helps someone, I’ll follow up with some pictures/video and solid data in the next few weeks.