@mattlo97
Thank you for uploading a video. From what you already posted, it looks like your machine is sized correctly, I see your bitsetter is front-left, is your (0.00,0.00) location for x- and y- axes the back-left corner? The skipping is probably directly related to things being off. There are plenty of XXL machine videos on the carbide 3d channel, those will show you what the bitsetter process is supposed to sound like. Once we see what settings you are using we may be able to get closer to finding the root of your issue.
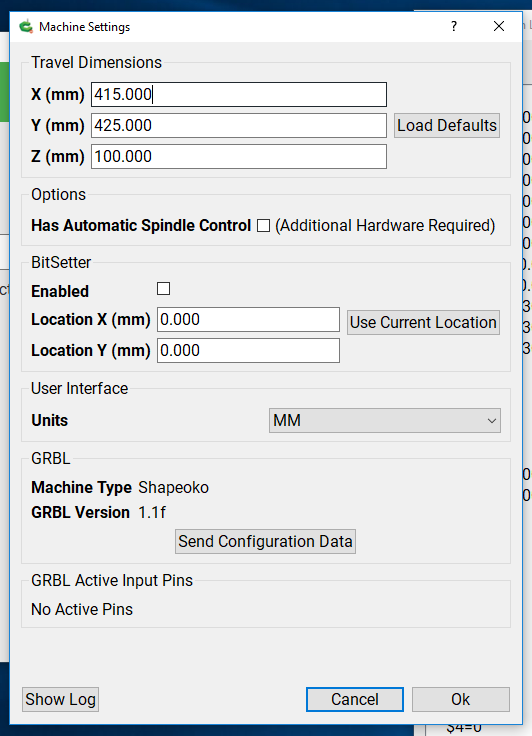
Here are some pics to help you get to your GRBL settings. This is the ‘Settings’ window for my machine (an SO3 with a z-Plus):
After clicking the ‘Show Log’ button on the lower left corner, drag the log window over to the side and make sure the ‘Hide Status Reports’ box is checked and then press the ‘Clear’ button. Then go back to the ‘MDI’ tab and type “$$” in the box and press send. Go back to your log window and click ‘Copy All’ and paste it in a text editor, then copy the lines shown below (an example from my machine) and paste them here so we can see your GRBL settings.
