Yeah the guy who created them has the copyright on the VESC name. Other manufacturers have to list their products as VESC compatible.
Maybe you’d find AMC’s servo amplifiers more suited to your background? We had good luck with their products years ago.
Maxon also makes some nice ones, but they apparently expect you to use their software, and maybe motors. Maxon’s knowledge base has lots of good info on DC motors.
OOPs - I should have watched the Maxon movie and seen that the EPOS4 and MAXPOS might be worth considering.
@LiamN the plan was to machine the three piece body on the Nomad. With the ballscrews and upgraded spindle it’s the most accurate machine in the arsenal.
@gmack we’ll have to see how an enclosed watercooled shell will do but I’m confident. Should be quieter and super low profile.
Guess I’ll pickup a temp sensor soon. Also brought the Mod-kita to the shop with the Nomad. I still want to mess around with the stock pwm output.
An output to feedhold on spindle overload would be money.
I have put together the RC circuit that should convert the PWM from the control board to a Analog Voltage the ADC on the VESC can read. The ADC on the VESC is 3.3V. I am not positive but the Carbite Control Board seems to output 5V on the PWM pin. Can someone please verify? If so I will need to put a voltage divider on the circuit.
1 Like
I look forward to seeing the result, in fact I like most of your pics of machined stuff…
2 Likes
Make sure the motor’s stator core is making good contract with your housing as well. Quite a bit of the heat will be generated there.
I will admit I find it funny that you are basically throwing 70% of this router away and turning it into a custom spindle. You could have easily gotten one of these:
connected it to a BLDC motor, and put it through two good angular contact bearings in a custom housing and gotten the same results.
@CthulhuLabs I’m pretty sure the Carbide pwm is 0-5v. There was a progression to this project. First corded conversion then put tons of hours on it and ran many many pounds of aluminum through it. Worst case it can all be put back to stock without issue and the nice thing is that it is a very compact package for 0.375/8mm capacity. My nomad had a bldc motor (70 watts) and separate spindle stack, kind of a pain to work with two separate spinning things and manage heat/belt drive.
The stator should be a light press fit and the bottom should lock in to prevent spinning in the body.
@LiamN thanks for the support! I’ll most likely get started on it after finishing a drag car roll cage. Gotta pay the bills somehow 
1 Like
There are quite a few Chinese ‘mechanical spindles’ available but I’m not sure they’re balanced well enough for 20-40kRPM.
The attractive aspect of the MakBLDC from my perspective is that it uses volume production parts (therefore cheap) for the housing, bearings and motor but can be made somewhat smarter by plugging in a VESC type controller. That makes it a good candidate for folks who don’t want to go to all the extra trouble of a 3 phase spindle.
My RC Circuit needs tuning, but I got PWM -> RC Circuit -> ADC working. The input from the RC Circuit to the ADC is very fluttery which is causing the Router to flutter as it ramps up and down.
2 Likes
Well I had it mostly working. It was still occasionally having issues getting started, but once started it was very smooth… Then my VESC stopped powering on. I think it was having issues which is why the motor wouldn’t start at times. Going to exchanging it for a new one.
In the mean time here is the RC Circuit I was using:
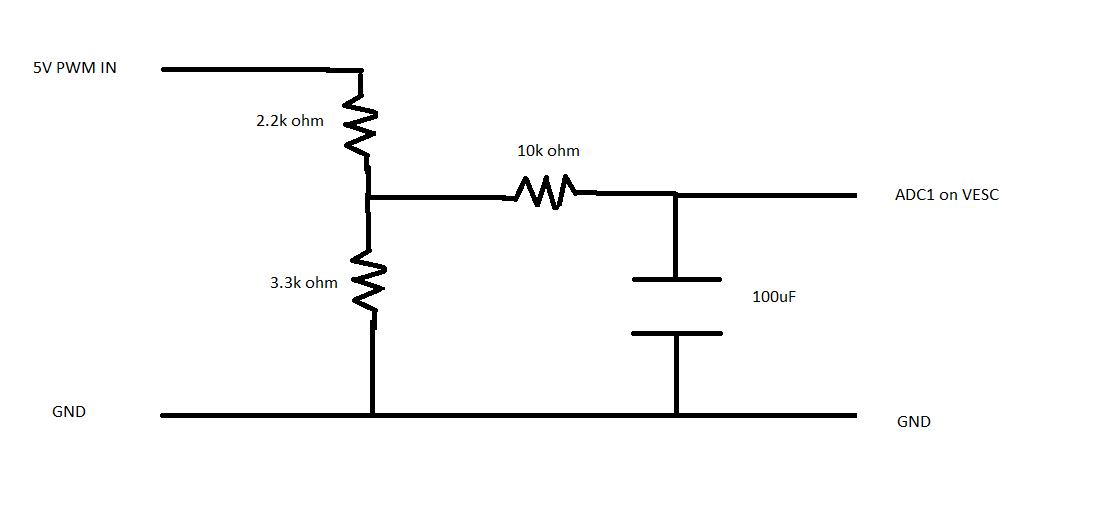
Sorry it looks like a potato. LOL
1 Like
edit
Smooth startup 100% of the time lowering the BEMF Coupling to 600. Even though motor detection wants like 1150.
Also would you be willing to duplicate your circuit?
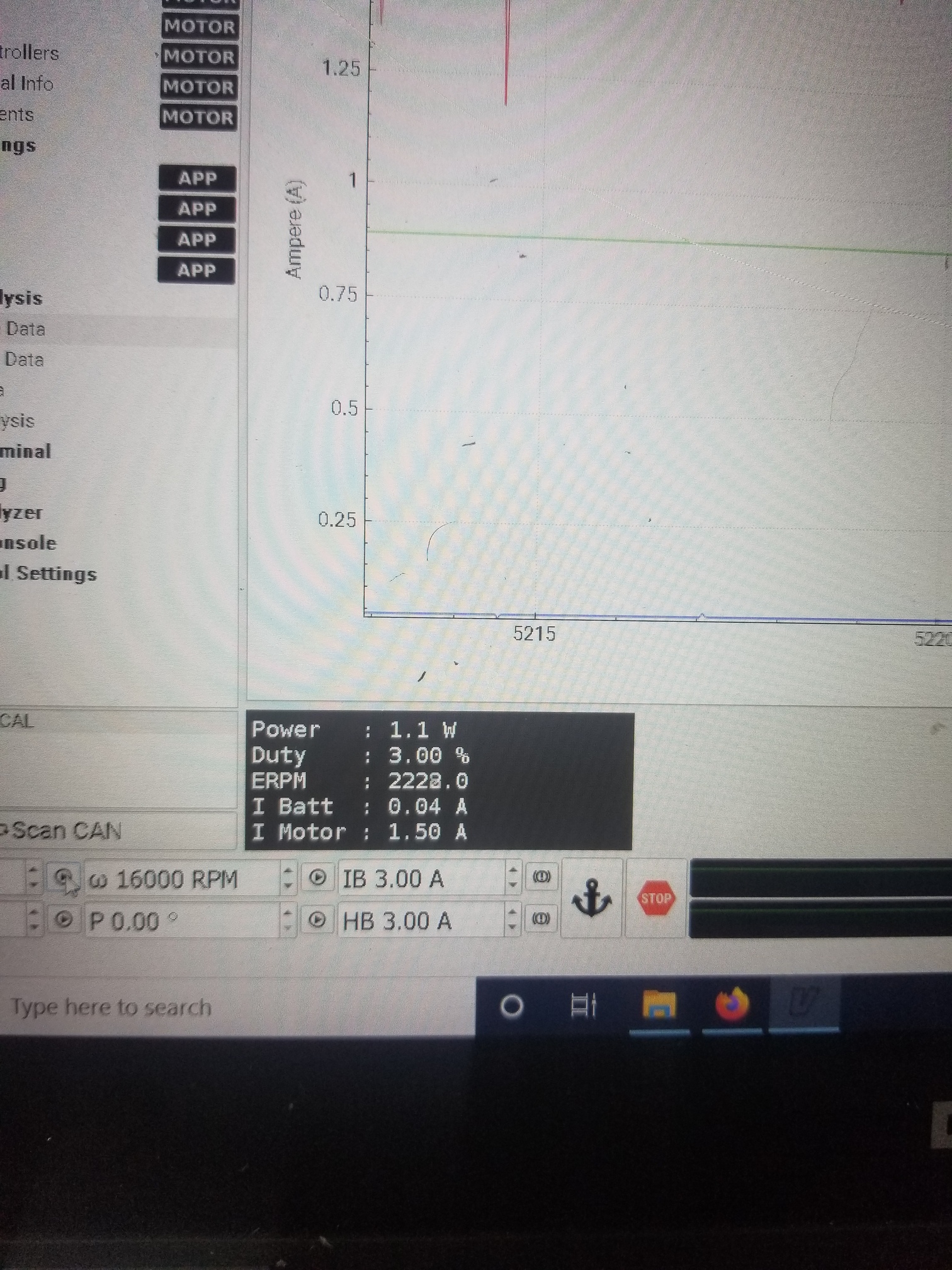
Good news is that at even 2500 rpm, this guy has some tq. Much more than my 60krpm 1.2kw 220v by the feel of it.
PMed you about the circuit.
Do you have it in BLDC mode or FOC? I’ve read warnings about FOC on the 4.xx boards.
I’m in BLDC mode because I cant run a FOC detection (still sensorless), plus ide rather have the rpm over TQ at super slow speeds. I had run this VESC on my hub motor setup in FOC though, worked well.
Decided to give it everything and see what its capable of, pretty solid 2-38krpm. Motor current pulls over 30amps on ramp up to max but it gets there quick!
Bare minimum unloaded
1 Like
Your 60kRPM spindle would have less than 1.26 * 2500 / 60000 = 0.0525 in-lbf of torque @ 2500RPM (that’s 1.55Watts).
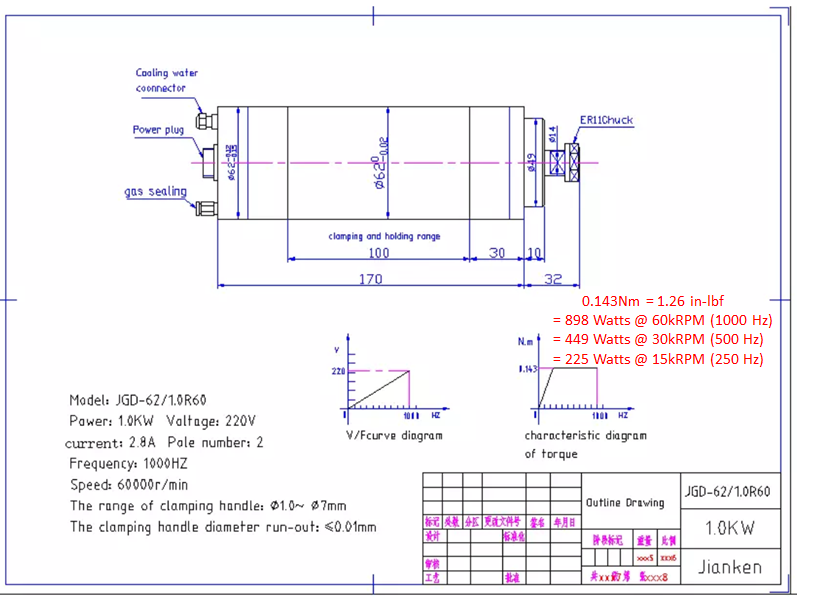
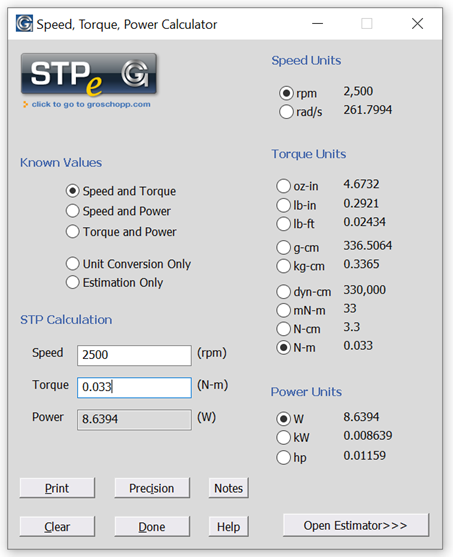
Your 5A power supply would limit torque at 2500RPM to less than 0.291 in-lbf (8.6Watts)
I didn’t mean rpm for rpm lol. I think I ran the 60k at a 20k min but I rather like messing with the vesc instead of that VFD.
You know I’m not great with numbers @gmack. Just going by feel right now until some real cutting starts.
I would certainly wait less time for the VESC to self-discharge before messing with it than a VFD with 320+VDC on the reservoir caps…
51A * 18V / 745.7 = 1.24HP somewhat justifies the claim that these types of routers have the same peak power as their 115Vac counterparts!
1 Like
Just to verify that my router did not fry when the VESC died I reconnected the stock ESC with a slight mod to use my power supply. It did not want to start. After a while of freaking out and troubleshooting, I was able to determine that the hall sensors were not reading properly. Come to find out my dupont crimp connections on the Hall Sensors are not the best and it is not making great contact all the time. Might explain why the VESC was not happy. Think I am going to solder them just to make sure. I blame Makita. They used the smallest gauge wire they could for every wire in this thing.
@Vince.Fab, @CthulhuLabs, @LiamN Please see this other thread for relevant additional info and a question.
@WillAdams, @Julien is there a better way to do this post?
1 Like