Indeed, it would also be really nice to see, the next time the controller boards are updated, pin headers exposed for the stepper step / dir / enable signals so that people could use external drivers and closed loop steppers if they want to without having to junk the controller.
1 Like
Good choice, inductance is measured at 100 kHz and an insignificant 2.5 mOhms. Should reduce ripple current without increasing required voltage.
@Vince.Fab’s VESC supports accelerometers, maybe he’d be interested in adding one to his Modkita? Maybe @CthulhuLabs could add one to his too? Another “real time” display/meter on the software GUI someday?
Then there’s this approach.
Only real problem I see with doing this is that my Arduino has about 10 feet of wires between it and the spindle. Accelerometers able to detect such vibrations have high data rates over SPI or I2C. Neither of which are really meant for runs on the same printed circuit board.
As for the VESC, I believe it is the hardware version 6 boards that support those.
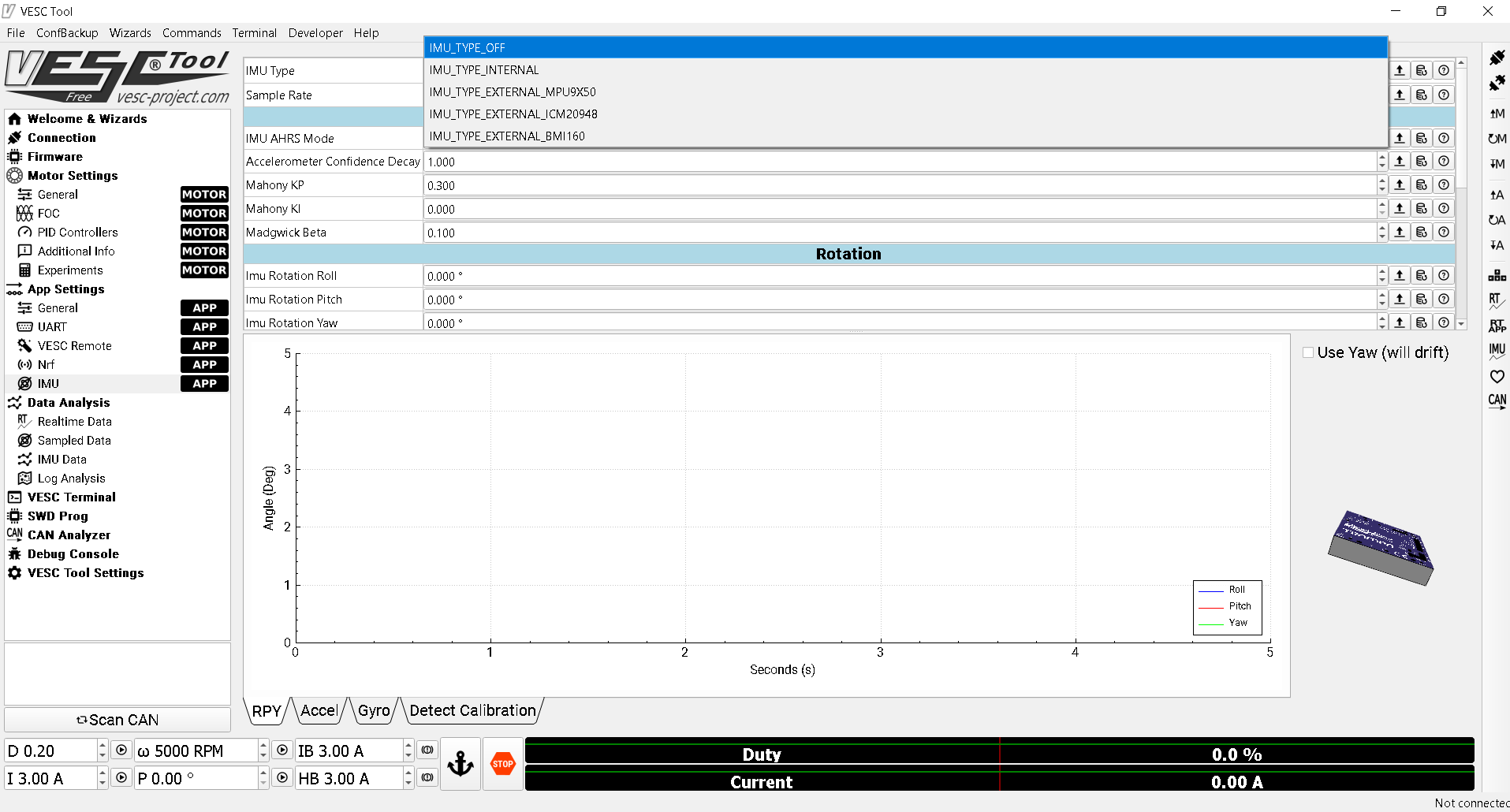
My VESC should support three separate types of external IMUs. I believe the 6 has an internal IMU. Also I’m not quite following what your guys are talking about with inductors and ripple currents. Would it be possible to explain it in a simple way?
An inductor is effectively a coil of wire that impedes the flow of current (this includes the coils in a motor). With alternating current an inductor will shift the voltage and current sine waves of of phase with each other. The ODrive needs these two waveforms to be shift a minimum amount in order to do it’s calculations. The Makita router has a very low inductance so it might not be shifting the two waveforms enough. This might be why I get an unstable current when using the halls sensors.
1 Like
Like in VFDs, the PWM frequency is much higher than the motor winding drive frequency that sets the rotation rate of the rotor. So, properly rated inductors can be put in series with the motor windings to block much of the (ripple) current at the PWM frequency while not negatively impacting motor performance. (The current thru inductors can’t change instantaneously, nor can the voltage across a capacitor.)
1 Like
What gmack said. LOL
This current probe is accurate to 20kHz, but likely usable well beyond that for relative measurements (with and without the series inductors?) Do you know what the ODrive PWM frequency is?
It is running at 24kHz
1 Like
That’s close enough to 20kHz that the current probe should be plenty accurate. With one of them connected to your scope, you should be able to easily see any 24kHz ripple component riding on top of motor winding commutation current. If you have one of those scopes that can do spectral analysis, you could also easily measure the difference in their magnitudes.
Quick off semi-topic question. I have one of the last belt drive Z access systems sold. I want to upgrade to either the Z-Plus or HDZ. Not sure which. Considering the experimentation I am doing with the Modkita and the desire to see how far I can go with that I am heavily leaning toward the HDZ. That said, I do not see myself milling aluminum in the near future as I live in an apartment (going to be buying a house in the next year) and do not want to piss off my neighbors. Also I have spent quite a bit more money on the Shapeoko than I originally planned so I am not sure I can justify the cost of the HDZ. Thoughts?
Check out this recent thread: Difference HDZ/ Z-Plus
Lots of opinions there on that matter to help you decide.
1 Like
As someone in precisely this position, it’s troublesome but doable. The main thing is that you’ll need to build an enclosure. For the Nomad this isn’t too bad but for the Shapeoko I imagine space and weight could make it an issue.
I have one. It is in my bedroom and takes up quite a bit of room. lol
1 Like
@CthulhuLabs I have a 3040 cnc on order, and wanted your opinion on spindle given I have a vesc from an old skateboard project. 400w brushless china spindle or modkita? Goal is aluminum and minimal noise.
Can you link to the brushless spindle?
Daedalus 400w Brushless Spindle Motor ER11 48V DC Air Cooled DC Machine Tool Spindle 12000rpm for Engraving Machine (400w Spindle) https://www.amazon.com/dp/B0895XQ99F/ref=cm_sw_r_cp_api_i_SHFpFb9YABZKG
Pretty sure the Modkita would have more torque. It definitely has a higher RPM range. The ER11 collet would be nice though and might have less runout.
Need the speed (reduces forces), not the torque (increases forces).