I’m trying to figure out the Carbide Compact Router’s max HP/torque and torque curve for HSMAdvisor – hopefully this data is useful to GWizard people as well – and want some feedback or another set of eyes. Here’s what I have:
Assumptions:
- Specs are identical to Makita RT0701c
- Constant torque router
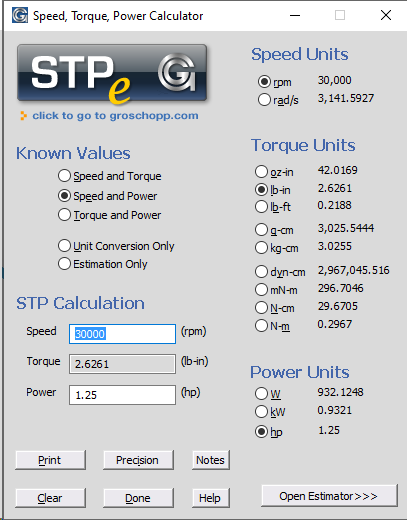
- Max power per Makita specs: 1.25 HP (932.12W)
- Max amps per Makita specs: 6.5A
- Efficiency (assumed): 90%
- Power factor (assumed): 90%
- Real-world max power: 0.847 HP (631.8W): 120 * 6.5 * 0.9 * 0.9 = 631.8W
Therefore, we have:
- Max power: 0.847 HP (631.8W)
- Max torque: 0.1392 ft-lb (0.1887N-M): 0.847HP / 32,000RPM = 0.1392 ft-lb
And since the router is constant torque, we have enough information to derive our torque curve (with only full stops on the RPM dial):
| RPM | Power (HP) | Torque (ft-lb) |
|---|---|---|
| 10000 | 0.27 | 0.14 |
| 14000 | 0.37 | 0.14 |
| 18000 | 0.48 | 0.14 |
| 23000 | 0.61 | 0.14 |
| 27000 | 0.72 | 0.14 |
| 32000 | 0.85 | 0.14 |
*Ignore the rounded-up, barely over-spec power/torque values in the table. That’s HSMAdvisor rounding things off.
Any thoughts or corrections to help nail this down would be a huge help. Thanks in advance.
 )
)