Has anyone played with the File Explorer defaults somehow on the Pi?
When I load a file with Carbide Motion, I’m looking to change the default size of it to be basically full screen, and remove the “file size” column. Name and Date are the most important.
Thank you so much, @fenrus and @robgrz and @WillAdams - my new Pi4 and 7" touchscreen are up and running. @fenrus, do you plan to keep your .zip updated? It was not hard to download the .deb file from the carbide3d website and update to the latest build, just curious. Thank you!
What do people’s general workflows/setups look like?
I was thinking of going RPi and touchscreen so I don’t have to tether and untether my computer. My concern is that I’d lose the ability to check my tool paths or make corrections without having to go a ways away from my SO3 to my “design” computer.
I have to admit that I usually use my Windows tablet — I’ll open the design in Carbide Create and verify/double/triple-check aspects of the settings, and if need be, can write out updated G-Code files easily.
That said, I did pull out my Raspberry Pi/Raspad intending to use it to configure/test my new Pro XXL, but wasn’t successful when it turned out Carbide Motion was no longer on it — not sure what happened there, must have reimaged the OS and forgotten I’d done so.
Couldn’t get 537 to load since it complained about an unsigned binary and despite reimaging the RasPad software it wouldn’t accept the default password. EDIT: Gave up on figuring out the RasPad password and loaded an updated version of Raspbian w/ apps so good to go.
Sit in the AC and design on my MAC with my huge screens. Complain about my poor art skills, get a design that is workable and that I like. Futz with depths. Talk myself into going too deep, then export my gcode to my repository on the local drive.
I then yell at the boy to go turn the CNC table on. Wait for the pi/machine to boot.
Connect to the exposed SMB drive and copy my gcode over to the pi
go out to the garage and then decide that I set it up to go to deep.
go back inside and save it with shallower depths
Copy code over
Go outside and run the machine
Complain about the poor quality of lumber
and then go back in and watch the proceedings via camera and VNC so I can change the bits when the machine wants a new one.
Complain about the poor quality of lumber
Then run it all over again at the original depth.
Then be so surprised it came as good as it did and show my wife
Haha should I go the Pi/tablet route I’d imagine my workflow looking quite similar.
It seems like the best option for me is to have something I can run my CAD/CAM programs at the CNC otherwise I’d have to have a second “design” computer in my work shop so I wouldn’t have to go from basement to 2nd floor all of the time to correct my mistakes.
I have a design-capable machine in the workshop for that exact reason - fixing things, or making ad-hoc jigs etc.
I do the majority of the design work in my office in the house on a 4K screen. Sometimes I generate gcode there, but I might not know the exact stock dimensions (for example) at that time.
So often, in the workshop, I load up the design on a computer there and finalize the parameters before generate the gcode.
In the workshop, I have one computer driving my Shapeoko, and another driving the Nomad.
I use a cloud drive (OneDrive in this case) for all projects and toolpaths, so every computer loads files from exactly the same directory structure. I never copy anything.
I’ve been pondering this myself. I think I might set up my main computer as a Remote Desktop, so that I can access it via the Pi if needed to make a quick tweak. And then having the files saved to a file server hosted locally by the Pi, similar to the file cloud @Gerry mentioned. This for me helps mitigate errors when duplicating/transferring files (or forgetting to update files)…which I have had issues with in the past.
I’ve been a Shapeko user for a few years. Always used an older (not ancient, but not state of the art) PC to drive the Shapeoko. No real issues - until I started getting very frequent disconnects. I run longer jobs, multiple ops / tools - and disconnects become a royal pain.
The only thing that I changed was the water cooling pump for my spindle. I reverted to the old one and no luck. Changed USB cables, checked for loose connections, powered to Shapeoko off a UPS, stopped using the vacuum - and a bunch of other things. Nothing worked - the disconnects persisted.
I can only blame it on an update from Evil Bill. Even if it’s not his fault it is.
Remembering I had on old Raspberry Pi 3B and a 7 inch touchscreen - I dug it out and followed the setup procedures as pioneered by others (not nearly as painful as I thought it would be).
Running Carbide Motion on a Pi is the best thing since sliced cheese. I wish I would have done it a few years ago! It boots quick - and more importantly steady as a rock. Never disconnects.
So if you are a fustrated Windoze user, I can’t recommend it enough. And it’s not hard to do.
Well that was a journey reading through this thread. I love eveything about using the Pi for motion. Not only does it allow for saved space around the machine, but the flexibility that is afforded to you by using a Linux distribution (Raspbian) is very exciting. Going to start piecing together my build as soon as I get home today, thanks everyone for ironing out all the issues to make this so easy! Cheers
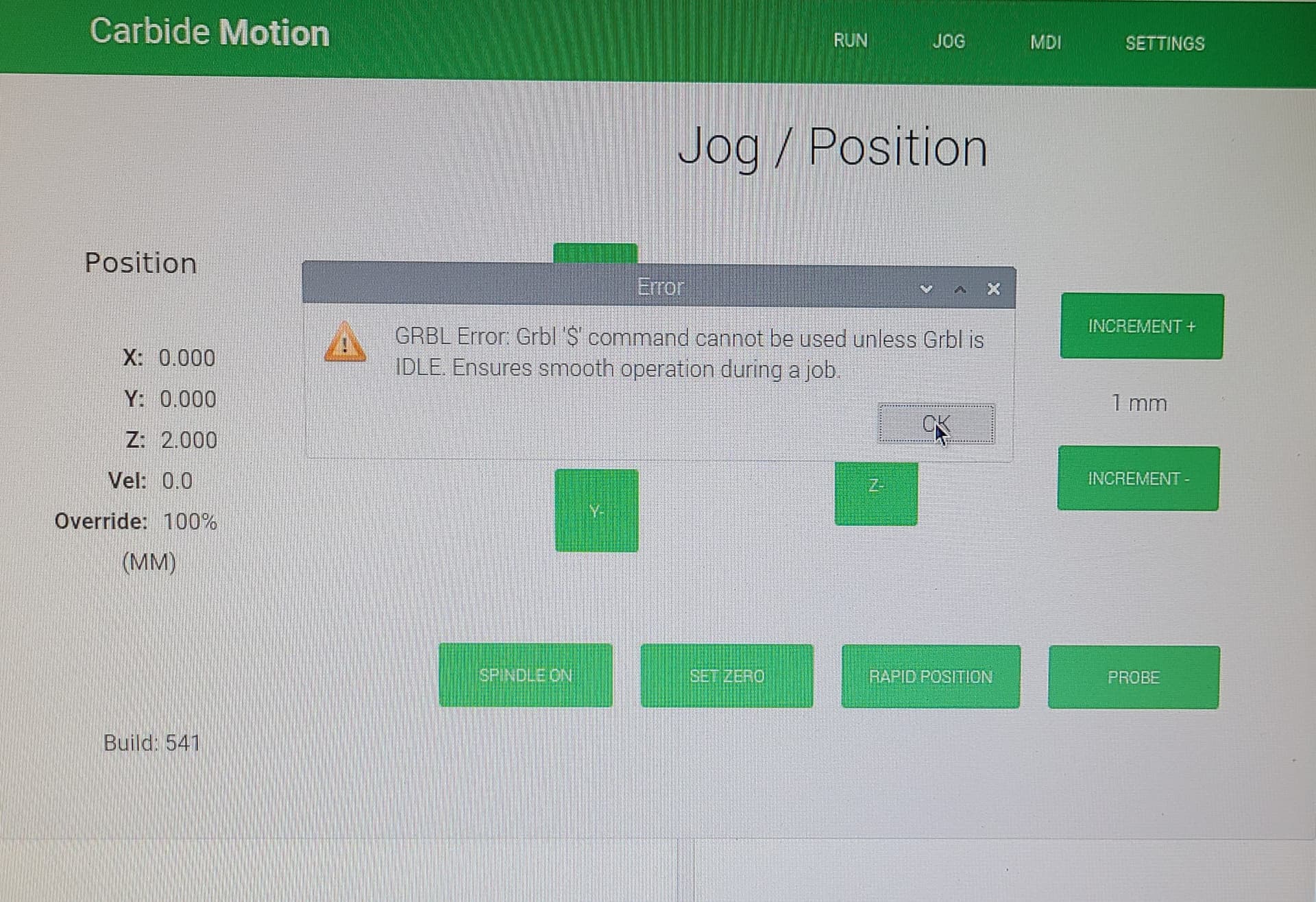
@robgrz so I downloaded the latest release of CM tonight (541) and noticed a small issue while jogging using the Z+ and Z- buttons in the GUI. If I press and hold either Z+ or Z- key I’m occasionally getting the following GRBL error.
I’m running a Shapeoko Pro XXL with the new HDZ installed and it seems to only occur with the 1mm increments on the Z axis. Sometimes it also seems to jog OK with no error but by pressing and holding in the opposite Z direction the error comes up fairly consistently. By clicking OK is goes away and it appears that the machines position in reference to the X,Y,Z coordinates are still valid which is good.
I also noticed the new warnings/pop-up messages about jogging around before setting zero and not to change tools which I get why but maybe it would be nice to have a check box to disable it from popping up again. One of the new messages had the checkbox to disable it but the other did not.
I understand that GRBL has a ‘smooth movement’ algorithm for continuous movements, but that does not kick in for the small step movements. There has been discussion about making this smooth movement more intelligent to kick in, but I too have experienced (on CM, UGS and others) this ‘commands to fast’ warning dialog.
Too bad about the popups. No doubt to reduce z-plunging questions to support, but those of us who use Change Tool religiously should have the option to suppress.
Winston saw that in an earlier test but we thought we fixed it. I’ll look into it more today.
For the time being, and probably forever, the “Would you like to measure your tool?” popup will not be dismissable with a “Don’t ask again” check box. A while ago we removed the mandatory tool check when entering jogging and that’s led to a lot of the “Unexpected plunge” complaints when people start jobs.
This new popup is less restrictive than the old mandatory check but we’re hoping that it protects people from tool changes done at the wrong time.
That’s good feedback, we’ll try that specifically today.