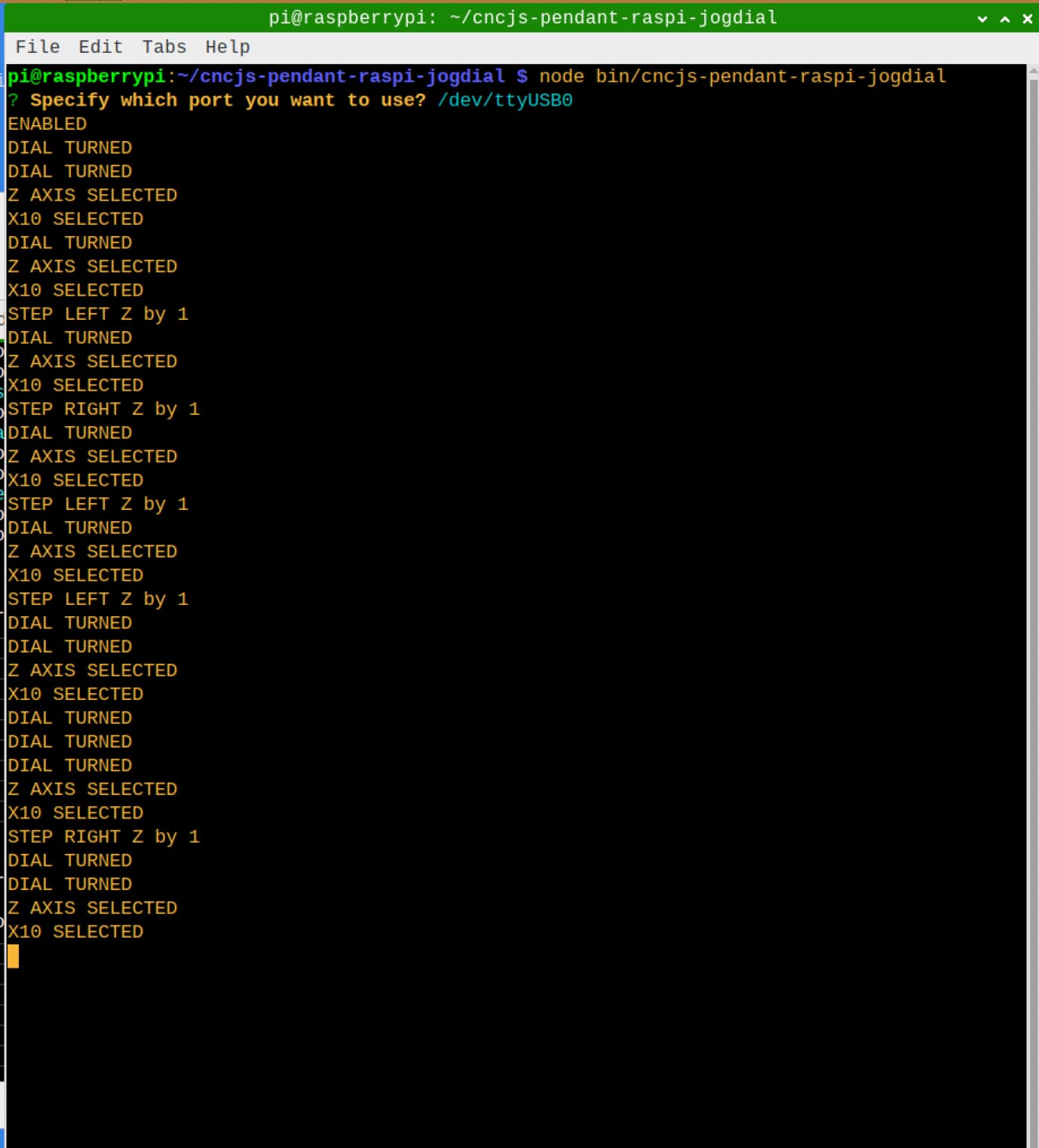
I added solder to the bottom to jump the points as you have here. It looks like it is logging the “DIAL TURNED” events you put in place. I’m not sure if this is just because I am using an arduino to simulate this, but I don’t actually see anything moving in my test setup in CNCjs. I will try and move it to the CNC tomorrow to see if it does anything, but the console makes me think there may still be something else going on (outside of my original issue).
pi@torchedflags:~/cncjs-pendant-raspi-jogdial$ node bin/cncjs-pendant-raspi-jogdial
? Specify which port you want to use? /dev/ttyACM0
Connected to ws://localhost:8000?token=eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJpZCI6IiIsIm5hbWUiOiJjbmNqcy1wZW5kYW50IiwiaWF0IjoxNTkwNDY1MzAwLCJleHAiOjE1OTMwNTczMDB9.XC2iEfD8EOmGa9nfYoNJQTfjuASTb27K7mOLOpR78Ys
Connected to port "/dev/ttyACM0" (Baud rate: 115200)
{ port: '/dev/ttyACM0',
baudrate: 115200,
controllerType: 'Grbl',
inuse: true }
[GRBL in]Grbl 0.9j ['$' for help]
[GRBL out]$$
[GRBL in]$0=10 (step pulse, usec)
[GRBL in]$1=25 (step idle delay, msec)
[GRBL in]$2=0 (step port invert mask:00000000)
[GRBL in]$3=0 (dir port invert mask:00000000)
[GRBL in]$4=0 (step enable invert, bool)
[GRBL in]$5=0 (limit pins invert, bool)
[GRBL in]$6=0 (probe pin invert, bool)
[GRBL in]$10=3 (status report mask:00000011)
[GRBL in]$11=0.010 (junction deviation, mm)
[GRBL in]$12=0.002 (arc tolerance, mm)
[GRBL in]$13=0 (report inches, bool)
[GRBL in]$20=0 (soft limits, bool)
[GRBL in]$21=0 (hard limits, bool)
[GRBL in]$22=0 (homing cycle, bool)
[GRBL in]$23=0 (homing dir invert mask:00000000)
[GRBL in]$24=25.000 (homing feed, mm/min)
[GRBL in]$25=500.000 (homing seek, mm/min)
[GRBL in]$26=250 (homing debounce, msec)
[GRBL in]$27=1.000 (homing pull-off, mm)
[GRBL in]$100=250.000 (x, step/mm)
[GRBL in]$101=250.000 (y, step/mm)
[GRBL in]$102=250.000 (z, step/mm)
[GRBL in]$110=500.000 (x max rate, mm/min)
[GRBL in]$111=500.000 (y max rate, mm/min)
[GRBL in]$112=500.000 (z max rate, mm/min)
[GRBL in]$120=10.000 (x accel, mm/sec^2)
[GRBL in]$121=10.000 (y accel, mm/sec^2)
[GRBL in]$122=10.000 (z accel, mm/sec^2)
[GRBL in]$130=200.000 (x max travel, mm)
[GRBL in]$131=200.000 (y max travel, mm)
[GRBL in]$132=200.000 (z max travel, mm)
[GRBL in]ok
ENABLED
DISABLED
ENABLED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponDialPulseTimeout / unsupported signal
DISABLED
ENABLED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: createServer smooth jogging / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponJoggingTimer / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponJoggingTimer / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponJoggingTimer / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponJoggingTimer / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X1 SELECTED
ERROR: uponJoggingTimer / unsupported signal
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DISABLED
ERROR: uponJoggingTimer / unsupported signal
SMOOTH JOGGING STOPPED
[GRBL out]
;
[GRBL in]error: Expected command letter
ENABLED
DISABLED
ENABLED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
START JOGGING Y mm in the positive direction at speed 100 mm/min
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
DIAL TURNED
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
DIAL TURNED
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X1 SELECTED
[GRBL out]$J=G91 G21 Y30 F100
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DISABLED
SMOOTH JOGGING STOPPED
[GRBL out]
;
[GRBL in]error: Expected command letter
ENABLED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
START JOGGING Y mm in the positive direction at speed 1000 mm/min
DIAL TURNED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
Y AXIS SELECTED
X10 SELECTED
[GRBL out]$J=G91 G21 Y30 F1000
DIAL TURNED
[GRBL in]error: Bad number format
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
START JOGGING X mm in the negative direction at speed 5000 mm/min
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
DIAL TURNED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
SMOOTH JOGGING STOPPED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DIAL TURNED
X AXIS SELECTED
X100 SELECTED
DISABLED
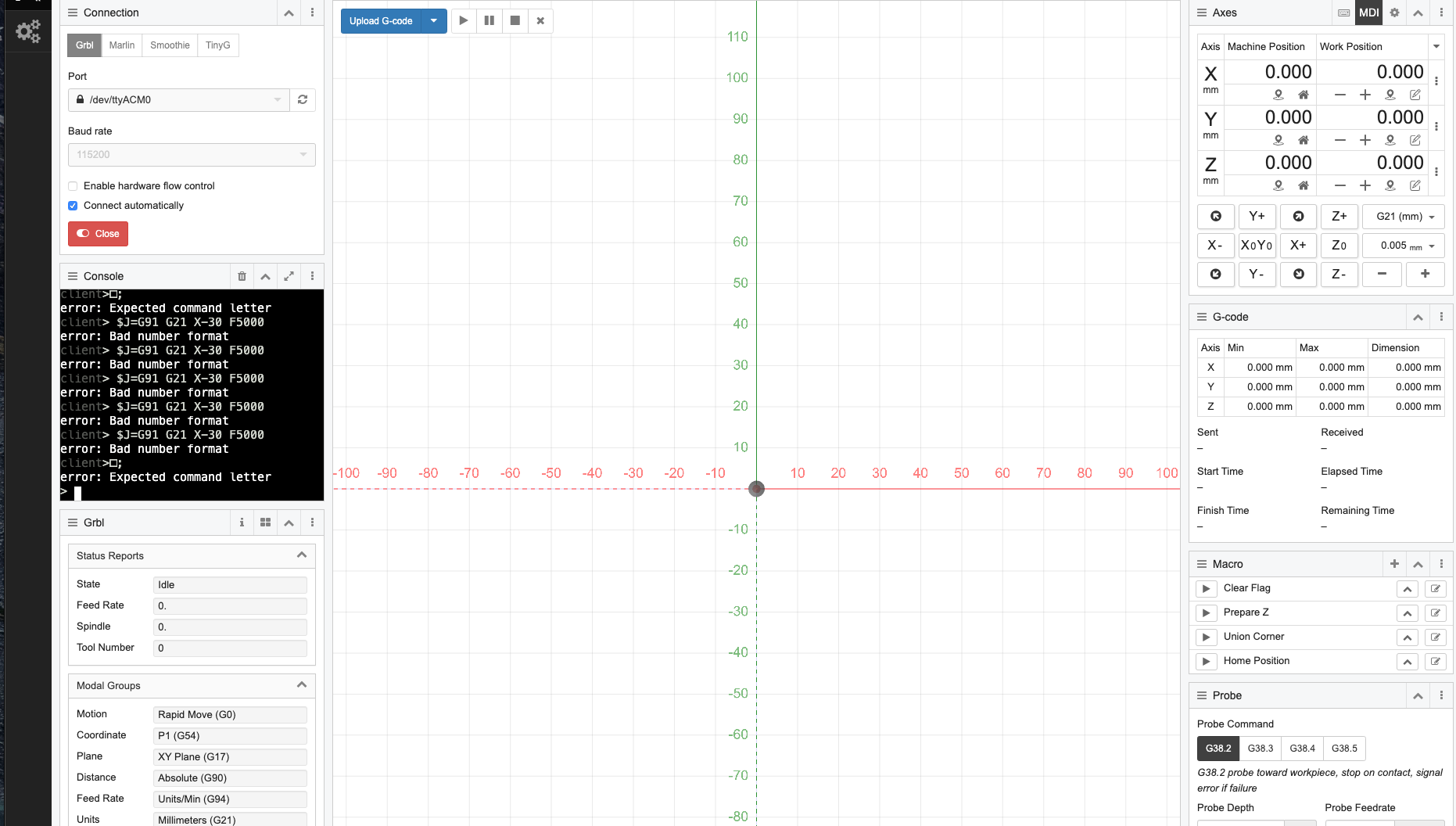
I am seeing responses in the CNCJS console such as:
client> $J=G91 G21 X-30 F5000
error: Bad number format
client>
;
error: Expected command letter
Again, this may just be due to it no actually being set up to my shapeoko and going through the Arduino, but if there’s anything that stands out to you before I make it to my machine test, let me know 
I appreciate all this help, so close!