I ran the hello world code on my just completed machine and everything went as it should. I followed the instructions after installing my limit switches and the code but the machine will not return to home after the job has run. When I click on the settings tab one line reads “Shapeoko Has Homing” with a value = “false” Any suggestions?
Ok, that worked I think…lol.
When I home the machine the y axis moves to the back, hits the switch and then comes back about an inch. The x axis moves and sets about 6" back to the left. Is that what its supposed to do?
Hi, I posted about my homing issue but noticed it was not on the support page and since I have not received any further info thought I’d try here. Every time I try to home the machine it goes to the back right hits the switch and comes back a quarter inch which I’m assuming is fine. The x axis goes to the right, hits the switch and travels back to the left about six inches. It should not go back that far should it? The GRBL code reads the same as the default values with exception of $14=1 (auto start, boo1).
You DID receive several responses (from the main SO3 guy, Edward) in that other thread…you didn’t quite allow 24 hours since your last note.
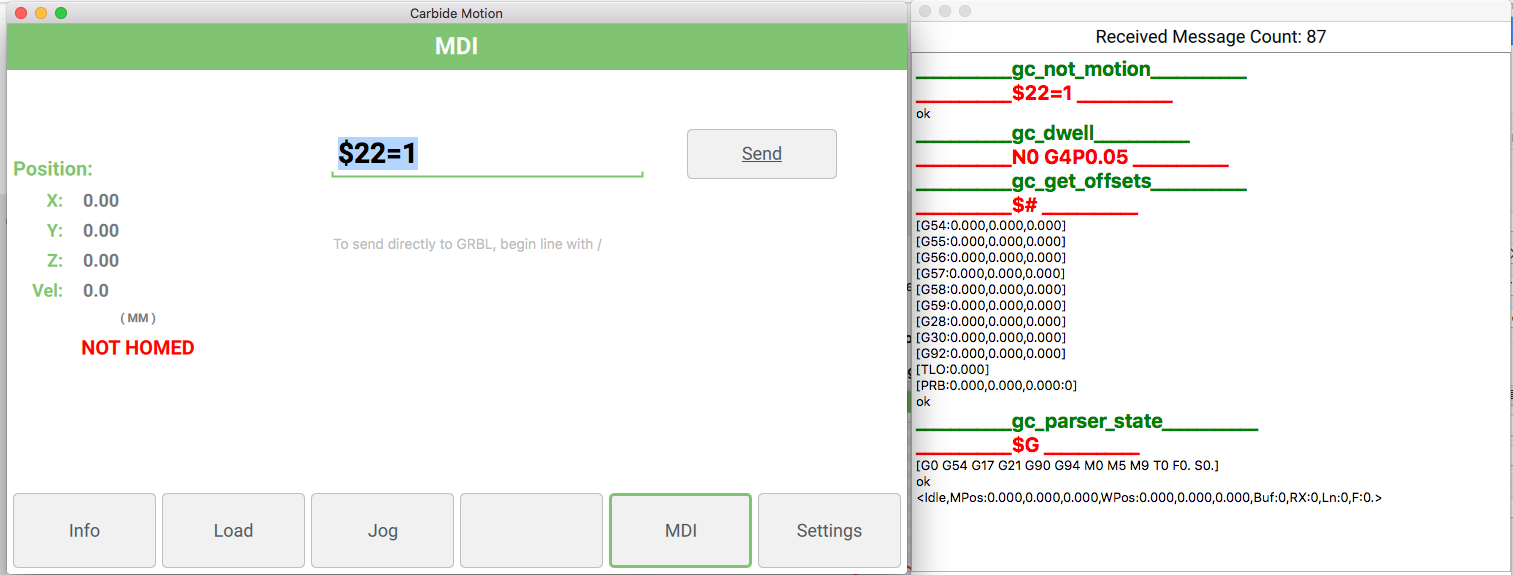
Anyway, as Edward mentioned in the other thread and provided steps and screenshots, you need to set $22=1. If you look at the settings you provided, you still have $22=0. Is that setting not “sticking” in your case?
Also, does tweaking the $27 setting change the amount that the axis backs off from the switch? The value is supposed to be millimeters, but if for some reason something is interpreting the “5” value as INCHES for that axis, well…might explain what you’re seeing? Try setting to 3 or 7 and see what difference that makes.
Thank you Craig and yes I realize I did receive several responses from Edward which did help to get me this far. I did not know I was suppose to wait 24 hours between posts, my mistake.
I misunderstood and thought my code was suppose to match the default code despite typing in the new code…(I’m a little slow sometimes). I now see what I was doing wrong. I would read the “Click To Begin Homing” message. Once I clicked it, it would act just as I said it did and I thought it was trying to home. From the Jog screen I never hit the Rapid button (didn’t know I was suppose to) and never saw the Homing Cycle button. Once I clicked on it, it did exactly what it is supposed to do.
So it looks like it was never a code issue but definitely user error!
Excellent, Bill. I only mentioned the 24 hour thing because Edward is busy trying to ship SO3 XL’s, XXL’s, and the associated upgrade kits. He’s a little underwater at the moment, so he likely doesn’t get as much opportunity to follow up on forum threads as he’d like to. It’s certainly not a rule or anything…