SuperGerbil has taken the place of my Arduino based grbl setup. Tip: If you don’t need the stepper drivers, choose the cheapest option. Tip #2: The flat pack case is not awesome.
Things to know: There are separate power inputs for the switches, the controller, and spindle motor controller, the pwm output driver. You need to supply power to each. You can share a 12V supply across the PWM, the switches with external jumpers. The controller power can come from USB, OR from a well regulated 5v supply.
The SuperGerbil has been on my radar for while, I’ll be watching this thread with interest should you decide to continue sharing details of your experience with this board
What would you like to know?
Unexpected stuff: Without the router on, it’s almost completely silent while moving. The change to external steppers I did previously was quiet, this is another step towards “wow, that’s really quiet.” Not sure what that actually means, doesn’t even really matter in the context of a router, but it’s interesting.
Well mostly I’d like to figure out the overall maturity of the SuperGerbil, and the effort required to migrate to it.
Did you use a vanilla GRBL and it worked out of the box ? what steppers are you using ?
If I were to go this way, it would be mostly to get the capability to control a 4th/5th axis. Just a fantasy for now.
First, it doesn’t run standard grbl, though to the senders it does look like it. It uses GRBL, ported to ARM, and with a few extra features (adds two available axis etc). All I’ve changed from my previous setup is change out the board.
I wonder if this controller could be used with Mach 4 which is very popular for CNC and supports up to 6 axis. Not sure it would make sense but I though I would learn.
Because I’ve never really liked the the sainsmart or protoneer boards. (adapters that go onto an UNO R3 to provide GRBL breakout).
The folks working on SuperGerbil are working on a bunch of stuff in both the software and hardware. Note that the board has an onboard motor controller for a spindle, tool change outputs, all sorts of potential fun…and it appears the mainline GRBL is awfully quiet.
I also bought one of these boards to add a 4th axis, but won’t get to this project until the fall, so I will also follow your adventures. (Ref: Shapeoko 3)
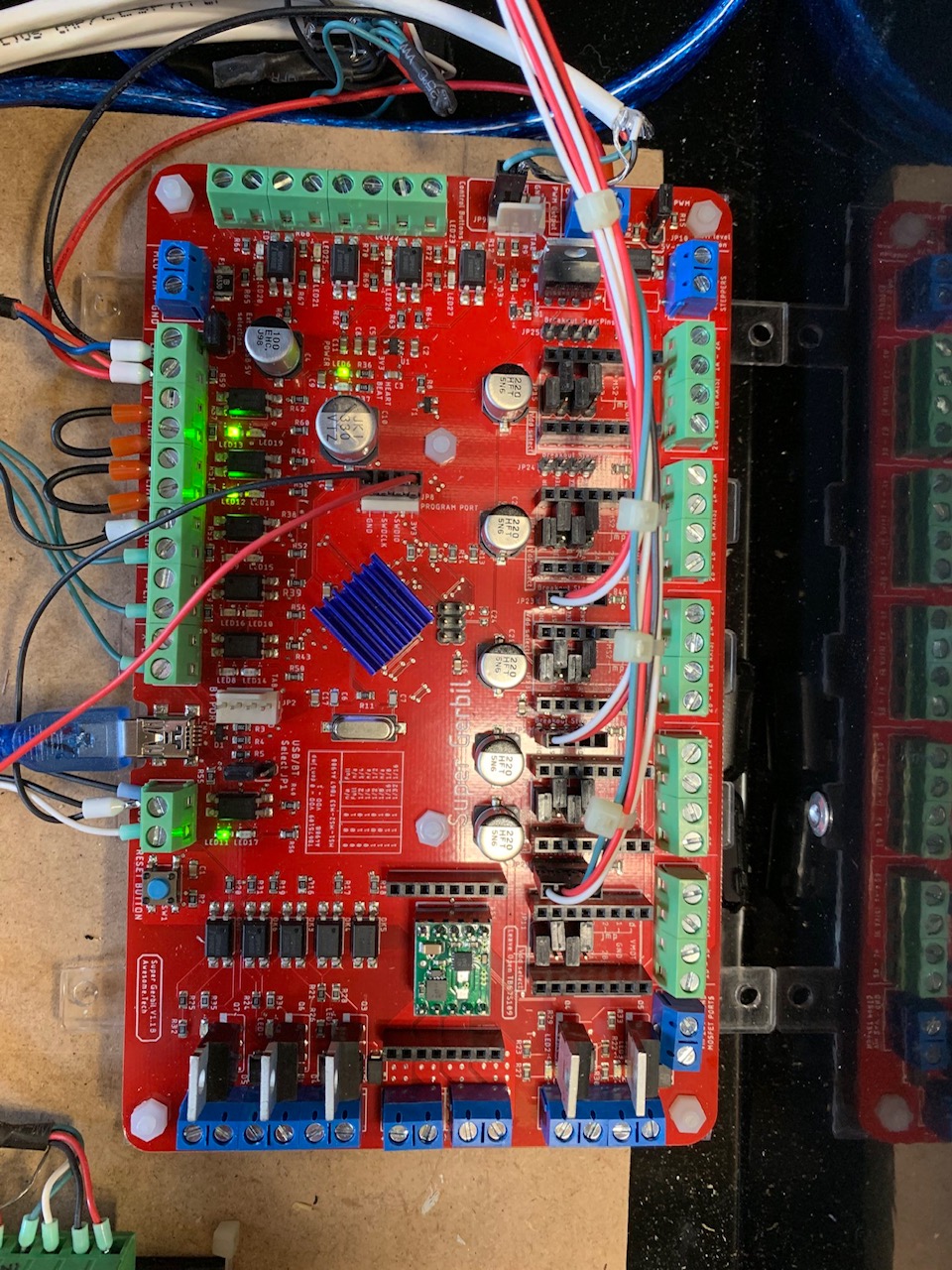
Can you explain this tip" Tip: If you don’t need the stepper drivers, choose the cheapest option. ((I see your jumpers…where are they going?)) PS More photos would be so helpful.
Right now, my biggest concern is driving both Y-axis motors off the single 4A supplied driver. Paul believed the driver can handle both motors…but I think it’s marginal. (and I don’t have a clue how to add a different type of drive.)
only 3 axis - so don’t bother with 5-axis functions - When these functions are called, an alert is raised
But with the Fusion 360 Class Reference it points to, and looking at the existing 4th/5th axis Post Processors… it’s shouldn’t be too hard to make a 4th/5th axis capable version.