Greetings, Shapeoko forum -
After much deliberation, I finally bit the bullet and ordered up an S3 16". It arrived earlier this week, and while I have grand intentions with this machine, I quickly realized that a garage full of camping supplies, a disassembled project motorcycle, a workbench with a partially disassembled v-twin motor and various totes lying around, my usable working space to fit the humble Shapeoko just isn’t there. So - aside from housekeeping on my part - the Shapeoko needs a home. Great - a project to start and finish before I can take on more projects!
I’ve perused around the web and this forum and have seen some great designs and concepts worked up. Unfortunately, I’m a mech.e and have difficulty with building something fit-for-purpose on the fly. (Read: over-engineered and over-analyzed.) What else is an engineer to do? Dive in to Fusion 360 of course! (I only have Inventor on my corporate-issued computer, and this gives me good practice with the different modeling approach.)
My design needs to fit a few specific parameters:
- It must be mobile
- It must be rigid
- It must be compact
- It must dampen vibration (as best as possible)
- It must look good
Instinctively, my first thought was to build something out of 80/20 t-slots like industrial automation equipment. I haven’t completely ruled this out, and it’s not terribly expensive, but the fastening solutions require special prep work if not using external brackets. (Yes, the S3 should have no problem preparing t-slot extrusions once assembled and trued - bit of a chicken or the egg conundrum. 80/20 will gladly prepare the ends for ~2$ each - which can drastically drive up the price per linear foot. For now, the t-slot idea is on the back burner - maybe something to kick around later, but I want to get going as quickly as possible. I need a common-man solution - a Home Depot solution!

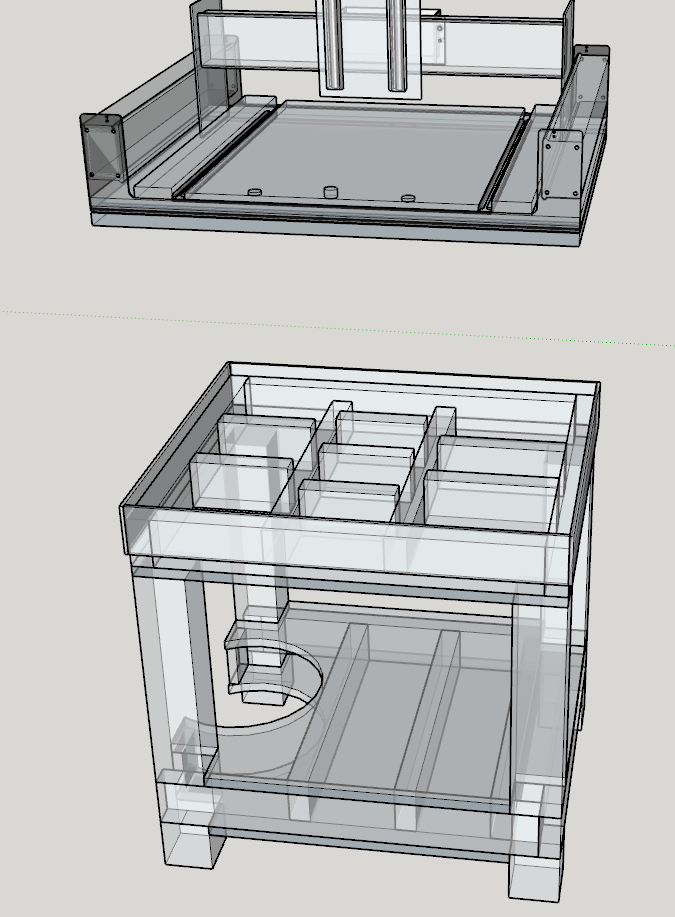
I started with a 3d model of the S3 (I didn’t model this - however the model is available to download for free from A360. It even has all the appropriate slider joints built in so all the axis can be moved to their respective limits.) and decided on a 30" x 30" footprint. It stands 36" tall (exclusive of the casters). The torsion top features 2-3-2-3 gussets longitudinally and 3 full-length transverse stiffeners. The torsion top frame is designed with off-the-shelf 1x4s in mind - only a chop saw, accurate measuring and final end-match sanding required. The top and bottom of the table can either be 3/4" MDF, or a 3/4" high-quality sanded ply. The rest of the construction is 2x4s, 4x4s and an additional sheet of ply for a shelf. Kreg normal and HD pocket holes and wood glue will provide the means of construction.
Ok, so I had completed the first design iteration. Time to build it, right? Wrong - time for static stress and modal analysis! (With all the great resources that Fusion 360 offers, why not, right?) Disclaimer: Fusion 360 did not accept my pine/plywood construction for my materials, but did offer an MDF option - close enough.
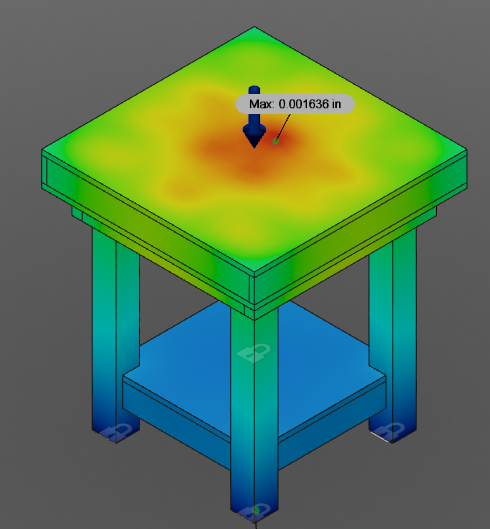
On with the stress analysis. 500lbs point-loaded at dead center of the table. Less than 0.002" deflection under 500lb load? Good enough in my book. Fusion 360 actually had the nerve on the results page to mention that the design is over-engineered, and costs could be reduced by optimizing the design or choosing less expensive materials - what sort of nonsense is that?
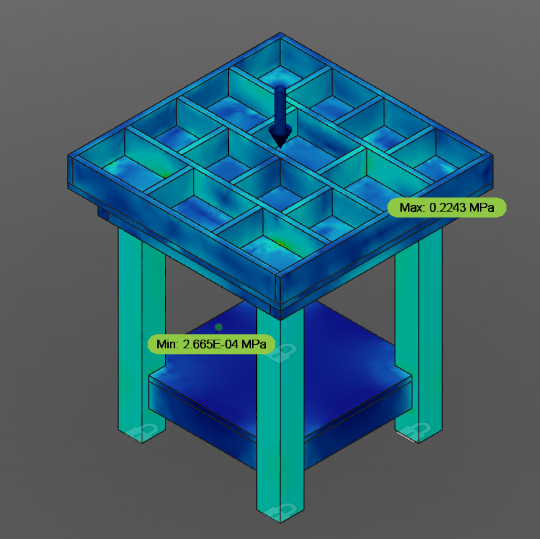
The Von Mises stress plot (I hid the top for clarity) shows the gussets doing their job and that the load is properly traveling through the vertical legs. Safety factor through the roof.
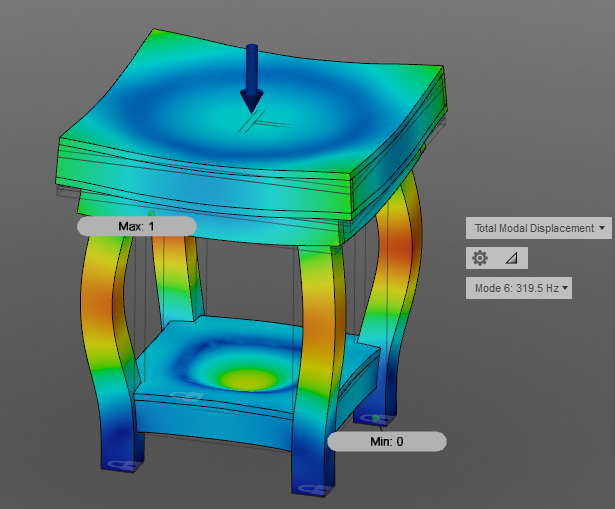
So I’ve proven it’s strong enough. Now what about those pesky resonant frequencies? I set a 70lb pre-load on the top deck and ran the analysis from 15000-28000 rpm, which is just outside the operating parameters of the Dewalt 611 router. The resonant frequencies within this range are excited by the following motor speeds:
- 16752 pm
- 16932 rpm (very close to speed 2)
- 17298 rpm
- 17328 rpm
- 18432 rpm
- 19170 rpm (very close to speed 3)
- 19524 rpm
- 19584 rpm
Since all the other motor speeds aren’t close to any of the above speeds, I can dismiss them from concern. Looking at the visual (exaggerated for clarity) results for modal potentials around router speeds 2/3:
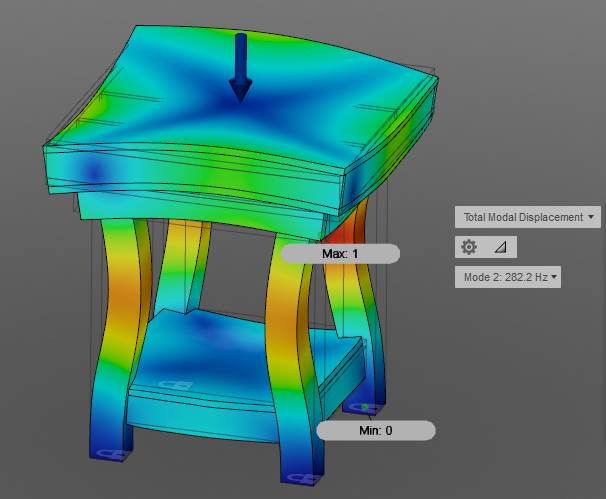
The more interesting results are at speed 3 - where the table top and bottom shelf essentially become passive loudspeakers.
Additional stiffeners were added on the vertical leg mid-spans, and one longitudinal stiffener was added under the bottom shelf. Analysis re-run.
A pretty solid loudspeaker effect is present at 17232 and 18246 rpm, which is in between router speeds 2 and 3 (it could resonate very briefly as the motor ramps up to operating speed).

Better, but let’s add 2 more transverse gussets and a 3/4" bottom skin to the shelf. It looks small because it’s a model, but the bottom board is 22" end to end - so think 19" speaker surface. This was actually my fourth iteration - the third didn’t include the bottom skin.

This scenario doesn’t occur until 21714 rpm, which will occur very briefly in between speeds 4 and 5 while ramping up.
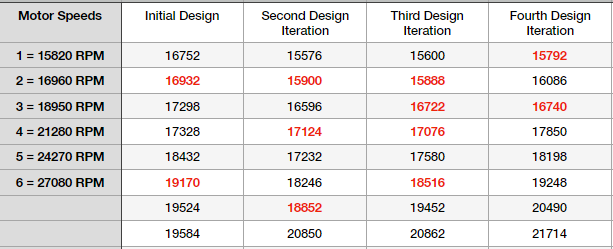
From the table, we see that the two most likely speeds that will resonate the bench are 1 and 2. In the results, these vibrations are translated through the bench legs and cross braces, but the table surfaces are relatively isolated. I’m not 100% happy with it, but this is good enough - also note that all of these designs assume that the Shakeoko is rigidly mounted to the bench top. I will likely isolate the Shapeoko from the tabletop with a damper of some sort.
And the final (for now) revision in it’s mahogany-stained, rendered glory!

Still to do:
- Design sound-attenuating enclosure
- Design a fold-out laptop shelf on the side
- Work out dust collection system (bucket shown for space-concept)
- Make a fab drawing + BOM
- Get off the computer and build the damn thing
- Document the build
- Build the Shapeoko
Once I’ve completed the drawing and take-off, I’ll post up the plans for use if anyone would like them. Thoughts on the overall design?