One question it’s posible to add a rotary ldevice like the one in the photo to a nomad?

The firmware which we use, Grbl, does not support a 4th-axis.
Work-arounds have ranged from replacing the electronics:
working up mechanisms/electronics to translate Y-axis movement into rotation:
EDIT:
or mounting a lathe:
or extending the concept of our flip frame to an additional axis:
or just use squared up stock and careful rotation:

2 Likes
I’ve also been in the market for a good fourth axis for the nomad.
Beyond all the firmware/electronics incompatibility (which I’m fully prepared to resolve) the thing that’s held me back is finding a good fourth axis small enough to work reasonably.
I’m doing a lot of precise little metal work so the requirements are pretty stringent. If you’re planning on wood and the like, there are plenty of options that look reasonable.
But yeah, it’s a heck of a undertaking and you’d better be comfortable (or stubborn) enough to work through it.
2 Likes
I’m thinking of trying to build a 4th axis (A axis?) out of one or two of these little guys:
https://a.co/d/fEys03K
The through hole is nice because I could use it in conjunction with something like a collet chuck for holding longer round stock.
Putting features on the end of a foot long piece of 1” OD brass bar would be pretty sweet.
It’s still very early stages for this idea but if anyone wants to chime in, I’d probably appreciate the commentary ![]()
I would want the alignment to be reasonably easy to dial in since it won’t live on the machine. Maybe that’s trivial with with the Saunders machine works plate and locating pins ![]()
If it’s just used as an indexing head, we could build in a proper rotary break to account for any slop in the system. If we want to use it as a continuous rotary it’s less straightforward.
I think the 10 to 1 should be strong enough for the kind of power these machines put out, especially if we can get a Nema23 on the input. (Seems they do so by request for the DN60 and as standard on the DN85)
So, anyone have any comments? Is this arrangement just a silly idea? Will it fail spectacularly? Maybe it’ll be awesome and you’ve got ideas for the chuck?
Let me know what you think ![]()
3 Likes
Tyler, it looks like on both the DN60 and DN85, the motor intrudes into the bearing ID. Would that be a factor for you? Their few application examples all seem to be using faceplates…
Yeah I saw that, I don’t think it’ll be an issue as the 60 has a 28mm ID. The small protrusion shouldn’t interfere with a 1” bar on center.
I will have to make a faceplate for most any chuck I want to use so I’m prepared for the inevitability. Should be a fun little project.
I went with the 85 but we’ll have to see how much Z that leaves for the bar. I’ll be able to re-use it for the laser rotary if it turns out to be too large. Time will tell ![]()
I’ll be watching for your results, Tyler! ![]() But this thread did make me watch the Maltese Falcon video again, which I think would work for a little model locomotive boiler (with domes and smokestack) I have been thinking of.
But this thread did make me watch the Maltese Falcon video again, which I think would work for a little model locomotive boiler (with domes and smokestack) I have been thinking of.
1 Like
Oh this is a pretty little piece of kit ![]()
I’ll likely use this 85 as the fourth axis but I may pick up the 5:1 60 as well just in case…and because I really like the build and feel.
(I’ll report back on accuracy and repeatability as soon as I figure out how to measure them on something like this ![]() )
)
2 Likes
![]()
![]() That does look great, Tyler. That is the 10:1? I did some studying of the Amazon page, and see that the 18:1 DN85 has an unobstructed bore (just to keep options open…) with the limitation of only a NEMA17 motor. I would be tempted to go that route, with the same center height of 42.5mm/1.673"
That does look great, Tyler. That is the 10:1? I did some studying of the Amazon page, and see that the 18:1 DN85 has an unobstructed bore (just to keep options open…) with the limitation of only a NEMA17 motor. I would be tempted to go that route, with the same center height of 42.5mm/1.673"
Thank you, by the way, for finding this! ![]()
1 Like
This topic was automatically closed after 30 days. New replies are no longer allowed.
I think the 18:1 can be made to fit a Nema23 by request. Though it may be a bit more expensive (from their website it seems like it would be ~$30 but that’s just a guess)
I’ll put this into action before I consider going up/down with the ratio.
What I can say so far is that this thing is pretty awesome for the price. I’ve ordered a 3” flanged ER40 collet chuck and a 3” 4 jaw self centering chuck. We’ll see what modifications they end up needing.
I grabbed a stepper I had laying around and threw it on to do some super quick tests. It’s pretty dang repeatable considering I’ve got nothing dialed in and the entire test is on the living room floor which moves by my leaning over ![]()
2um dti and rapids back and forth. Not bad at all.
There’s also no shot that I can turn this by hand when the stepper is holding so I think it’ll be plenty strong enough for basic indexing.
I’m not sure what the torque looks like at speed for continuous fourth axis but I don’t think that will be a problem in the end (I plan on putting a clear path servo on it because they go real fast and…well I’ve just wanted to play with one for awhile ![]() )
)
Apologies for the stepper screams, it doesn’t like to spin so fast ![]()
2 Likes
I think that would obstruct the bore again though… The way it looks to me, the only way the bore is not restricted is because of the Nema17-only design. I kind of like the concept of the 18:1, that gives 20 degrees per motor rotation, or 0.1 degrees per full step. Nice and neat and even I can do that sort of math in my head… ![]()
I am assuming since you said continuous fourth axis that you are planning to something radical (and knowing your track record, really cool) about the Nomad’s driver board and Grbl-based control software?
My own mental musing involves an independently-controlled indexing driver. MeshCAM has (or did, the last time I seriously used it–I’m just re-learning it after my extended sabbatical) provision for indexed machining.
I’m at work now with no YouTube access but looking forward to getting home and hearing the Scream of the Stepper. ![]()
1 Like
Ah the nema17 is small enough to not obstruct the bore, that makes sense. Depending on how close this is to fitting a 1” bar, I may do a tiny bit of grinding on my rotary ![]()
As for simple math, I don’t have to do any. That’s what the computer is for ![]()
Though to further your point on simple straightforward maths, with a fancy stepper controller like the Gecko Drive GR214V you can do 18 and 180 microstepping which is pretty convenient for a standard stepper. Maybe more useful with a harmonic drive for no backlash, I doubt a worm drive will give you .01 or .001 degree accuracy. Not that I’d need it for anything anyway.
If you’re just doing indexing, Gecko makes a dedicated rotary stepper driver with some really neat built in features as well. Maybe offload some of the logic directly to the driver ![]()
But yeah, for continuous fourth axis we’d need to do something silly and knowing my track record it will be plenty silly ![]()
(I want to make my own small form factor CNC stone milling machine so I’ve got some parts I can borrow while that machine comes together, that’s for another post though ![]() )
)
I don’t know how meshcam handles things but I think fusion can do 3+1 without upgrading the license. So I’m planning a similar thing to you with an independent indexing controller for use with the standard carbide setup.
I imagine the way to get a pause in carbide motion will be a hacky tool change or something similar. We’ll see when we get there.
1 Like
The more interesting thing to see would be notching the Nema23 motor… ![]() (It looks like the motor mount is shrunk-fit to the motor cross-section)
(It looks like the motor mount is shrunk-fit to the motor cross-section)
1 Like

I’ll sacrifice a stepper in the name of science if I have to. Surely it doesn’t need all of its casing ![]()
3 Likes
SCIENCE! ![]() (apparently the emoji text doesn’t contribute to the 20-character requirement)
(apparently the emoji text doesn’t contribute to the 20-character requirement)
1 Like
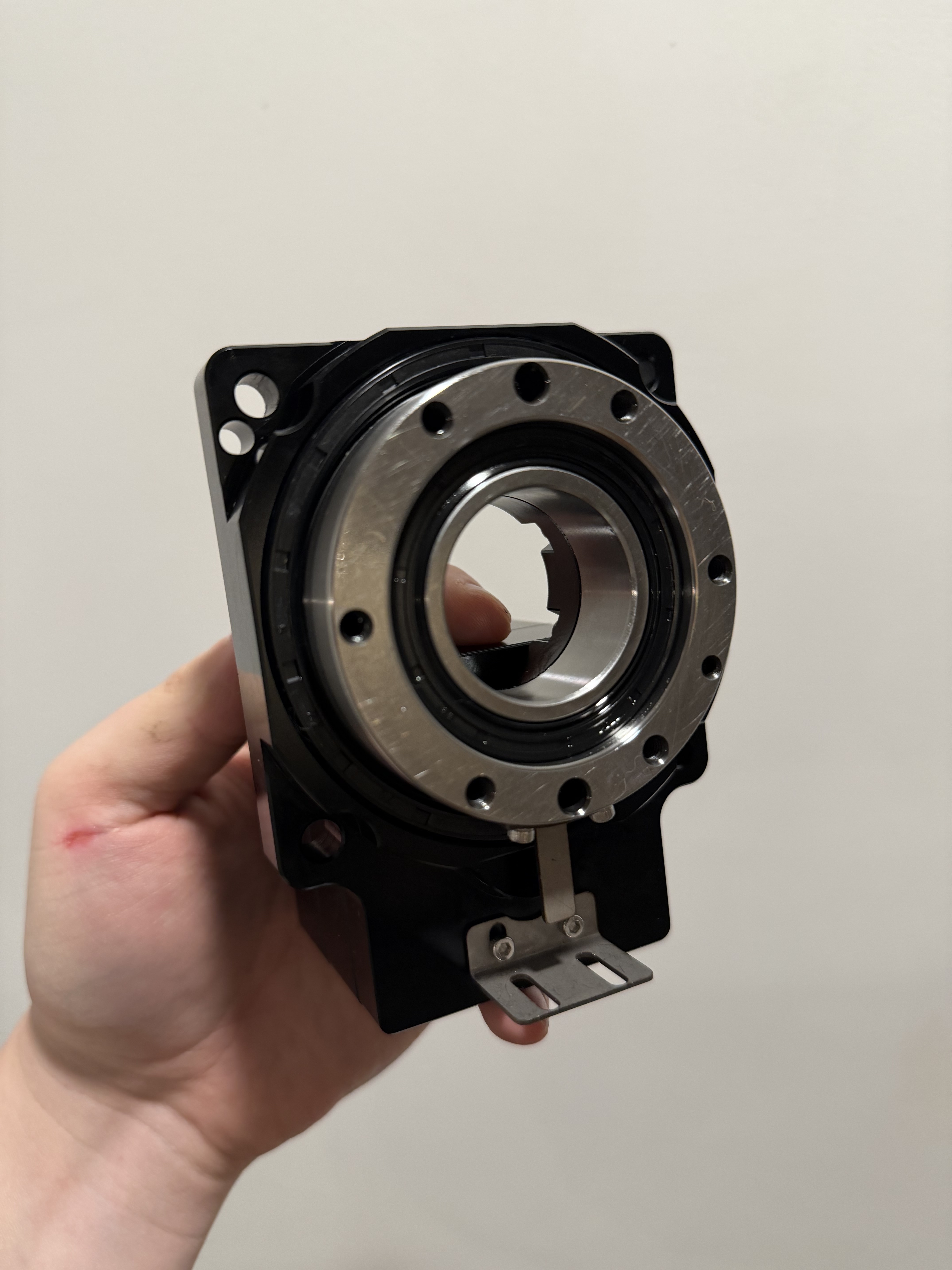
I did a thing. Finally.
Adapted an ER40 collet chuck to the face of the rotary. Very close slip fit and a few clearance bores for 4m bolts.
Here is the relieved and a mostly original chuck side by side:


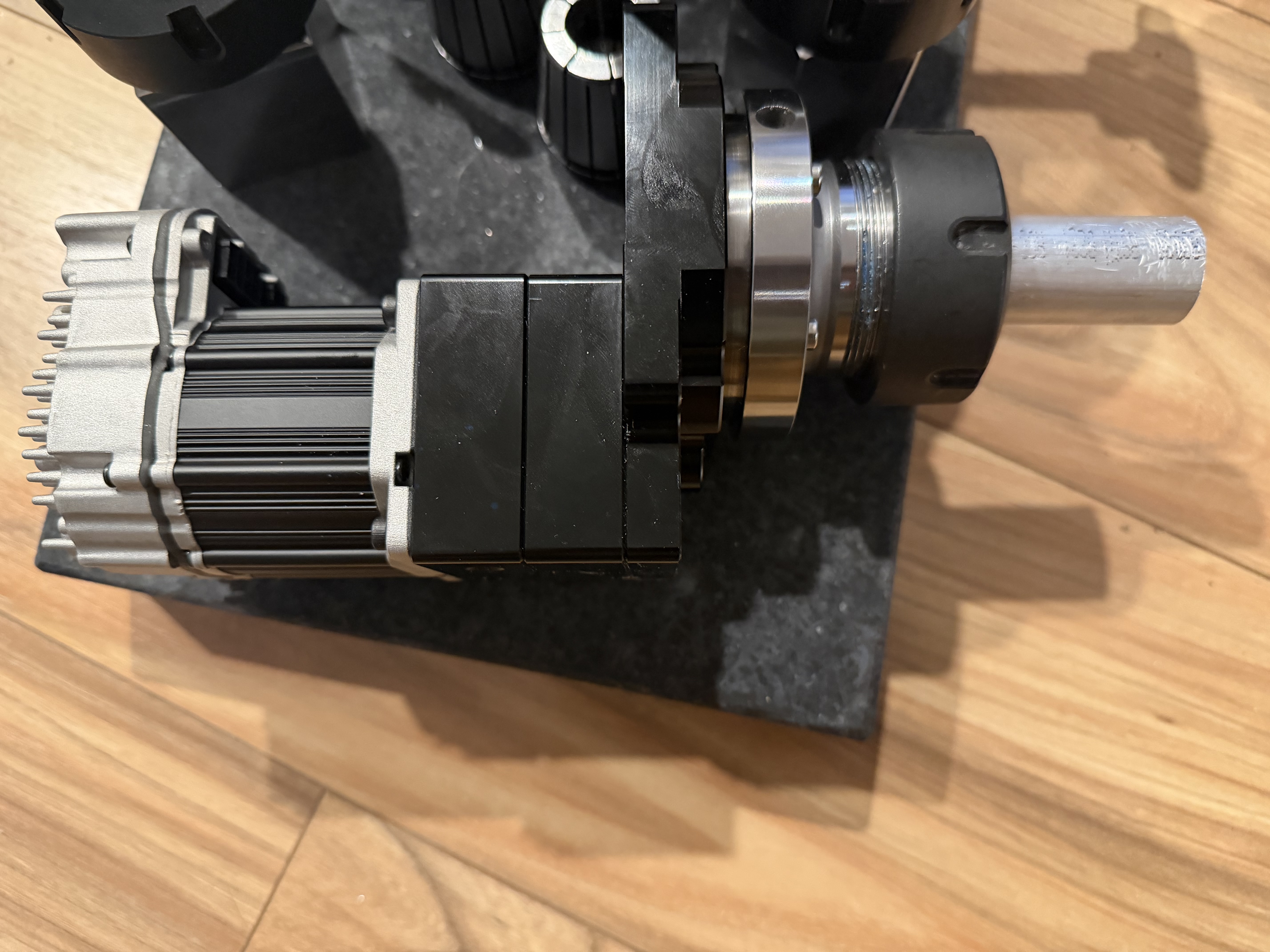
And the entire thing fitted up:
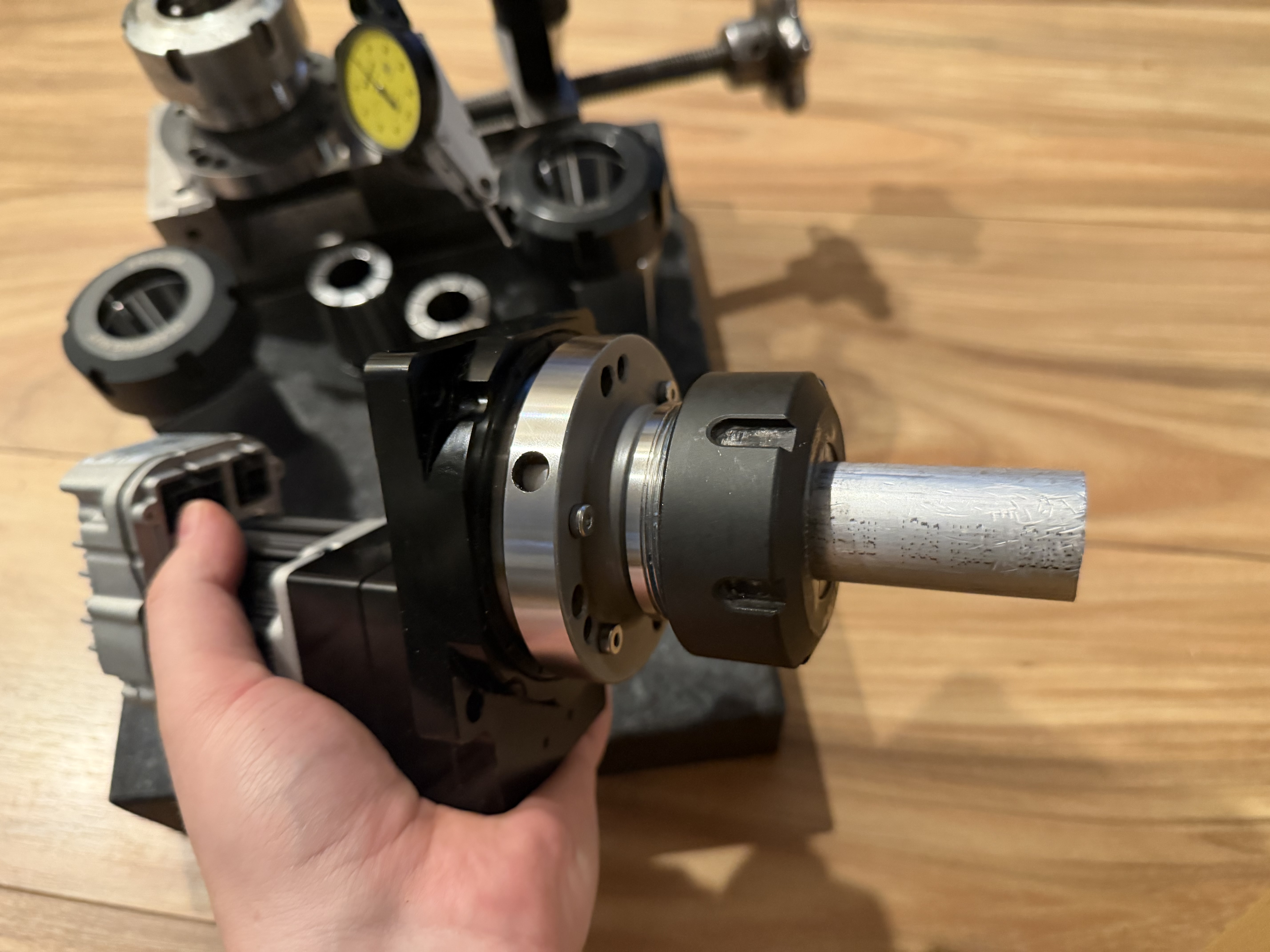
How well will it work? No idea ![]()
But once I find out I’ll update the thread with lessons learned.
3 Likes
Looks beefy. New controller? Or wire the y-axis driver into the rotary stepper?
1 Like